في هذا الدرس ستتعلم طريقة صنع الدرج المضيء باستخدام الاردوينو وحساس الحركة.
Arduino| اردوينو
تعرف على وحدة الاتصال الاسلكي SIM800L التي تساعدك على الاتصال أو ارسال الرسائل باستخدام ...
Arduino| اردوينو Sensors | حساسات
في هذا المشروع سنتعمل صنع اضاءة مكتبية للقراءة ، يمكننا التحكم في سطوع الإضاءة ...
مقدمة في هذا الدرس ستتعلم كيف تصنع آلة حاسبة باستخدام الاردوينو ولوحة المفاتيح. ...
اصنع عربة تسوق ذكية باستخدام الاردوينو و RFID ، تعرض سعر المنتجات و تحسب القيمة ...
في هذا الدرس ستتعلم كيفية عرض الصور على الشاشة (OLED) باستخدام الاردوينو.
في هذا الدرس ستتعلم صنع نظام لقياس مستوى الماء باستخدام الاردوينو وحساس مستوى ...
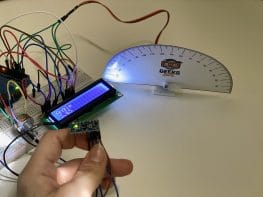
في هذا الدرس، ستتعلم كيفية صناعة منقلة رقمية باستخدام حساس التسارع.
بخطوات سهلة يمكن صنع جهاز ينقل البيانات لا سلكيا عن طريق الضوء
في هذا الدرس ستتعلم كيفية تمثيل المسافة باستخدام الاردوينو وواجهة المستخدم الرسومية.
في هذا الدرس ستتعلم صناعة سلة ذكية متعددة الأغراض باستخدام الاردوينو وحساس المسافة ...
في هذا الدرس ستتعلم صناعة فأرة الحاسوب بنفسك باستخدام الاردوينو وعصا التحكم.
يجب عليك تسجيل الدخول للمتابعة. دخول تسجيل عضوية