مقدمة
في هذا الدرس سنقوم ببناء جهاز ألعاب فيديو محمول وعلى الجهاز سنقوم ببرمجة لعبة تحطيم اللبنات باستخدام الاردوينو والشاشة الكرستالية.
المواد والأدوات
1× اردوينو اونو

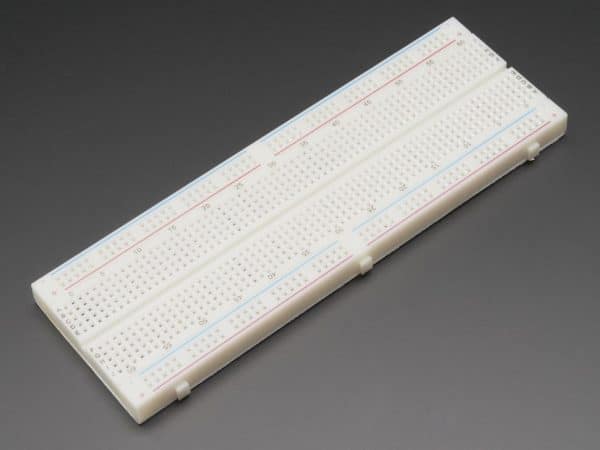
1× سلك الاردوينو
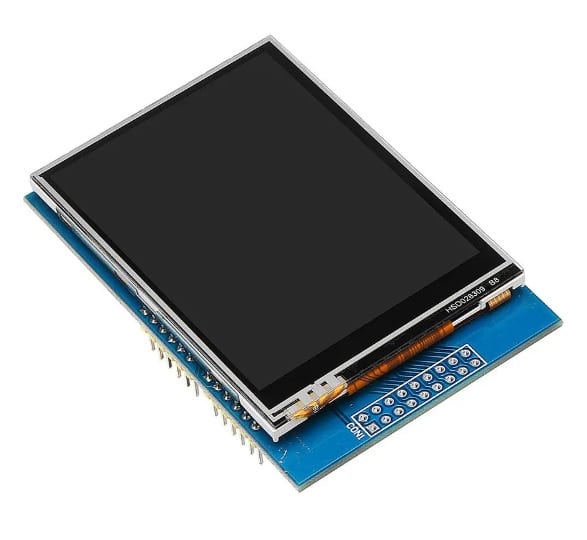
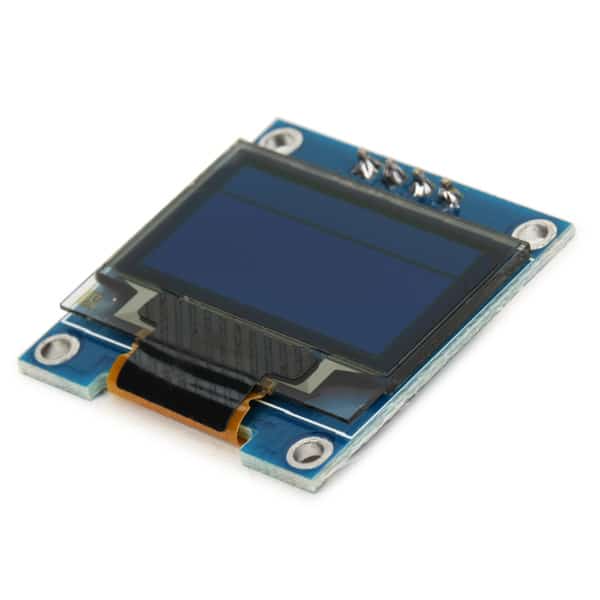
1× شاشة كرستالية “2.8
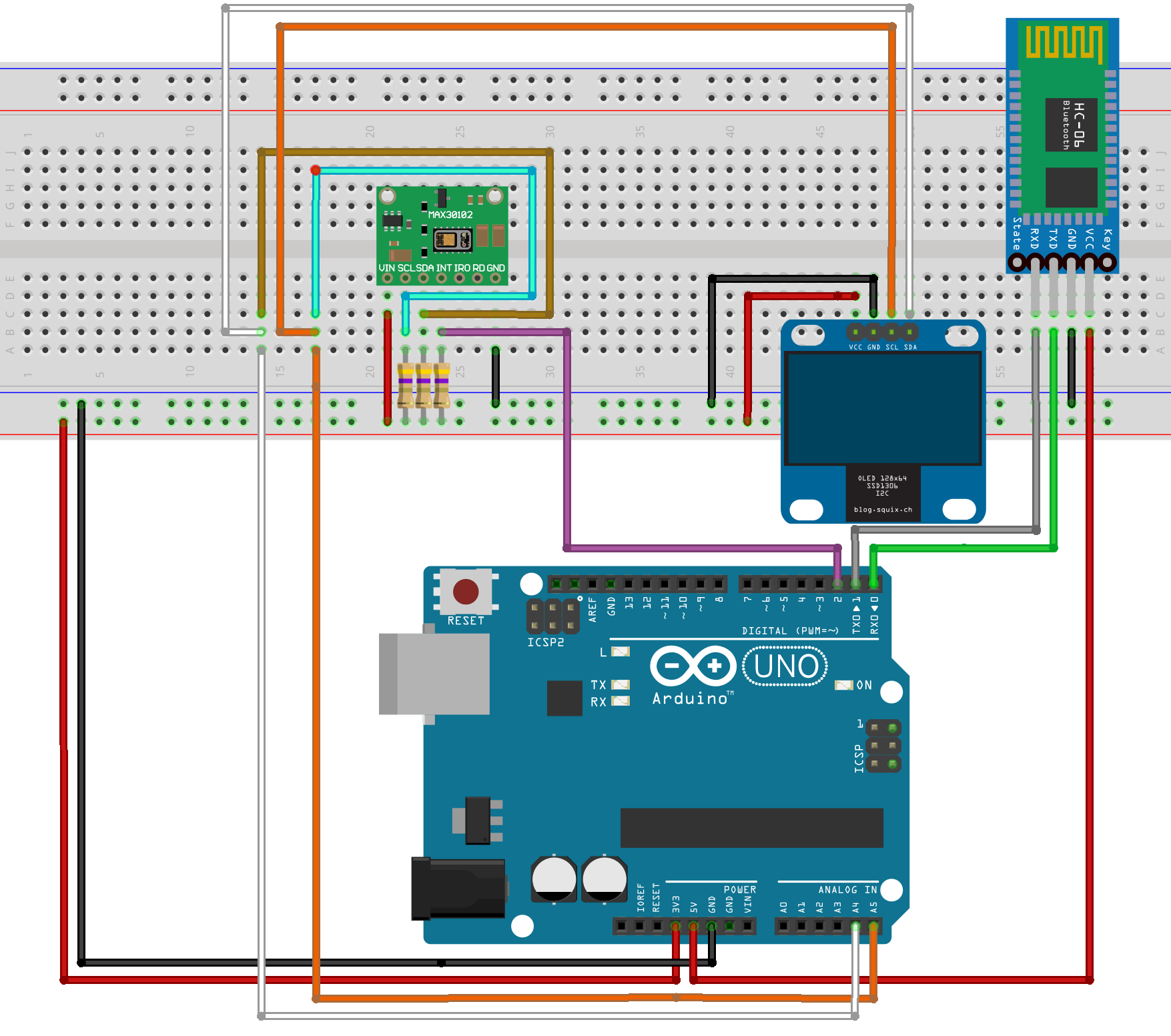
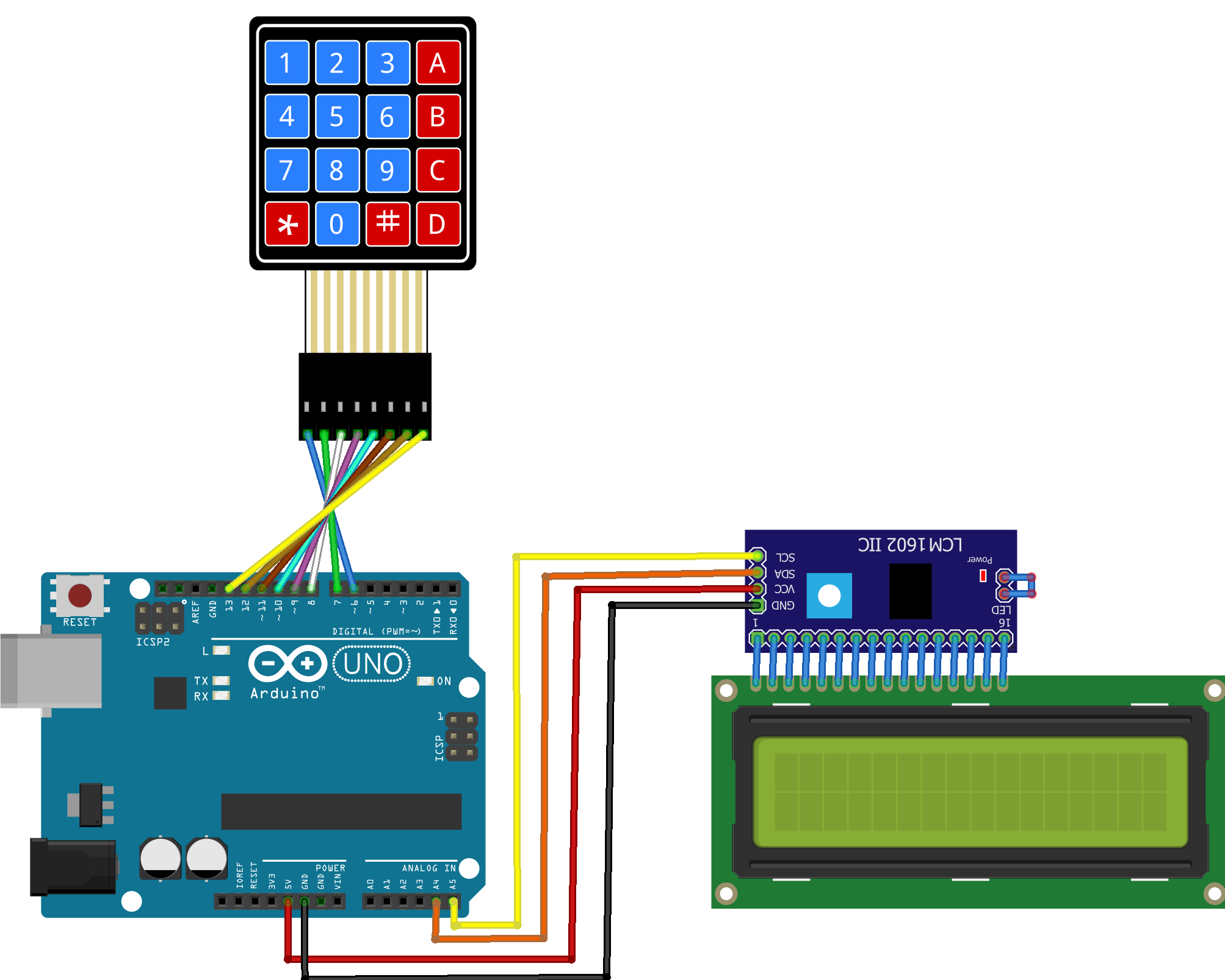
توصيل الدائرة
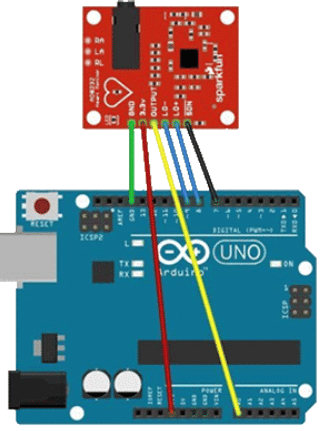
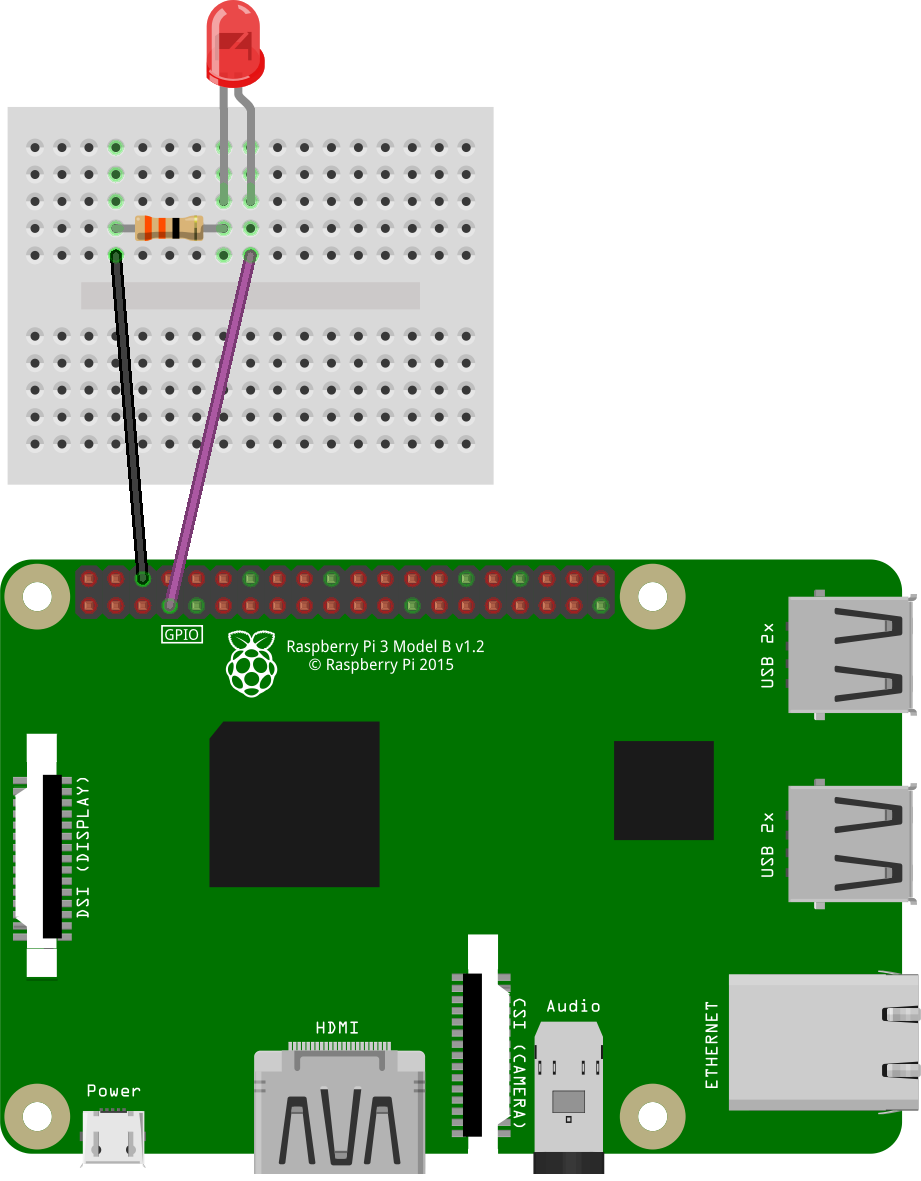
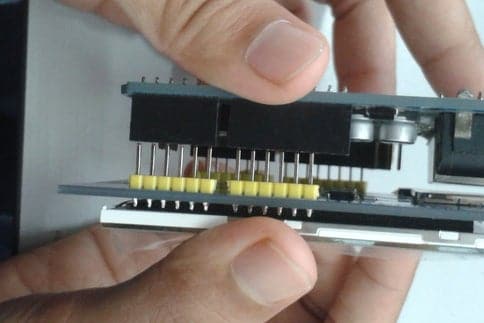
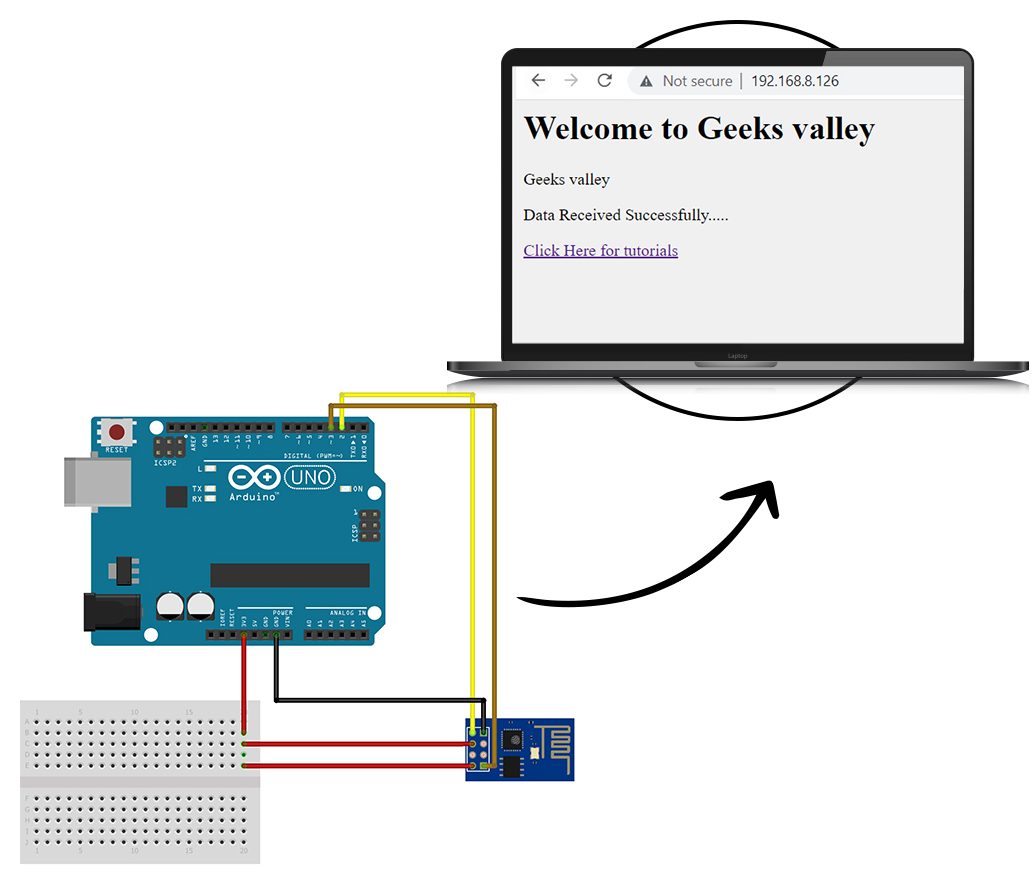
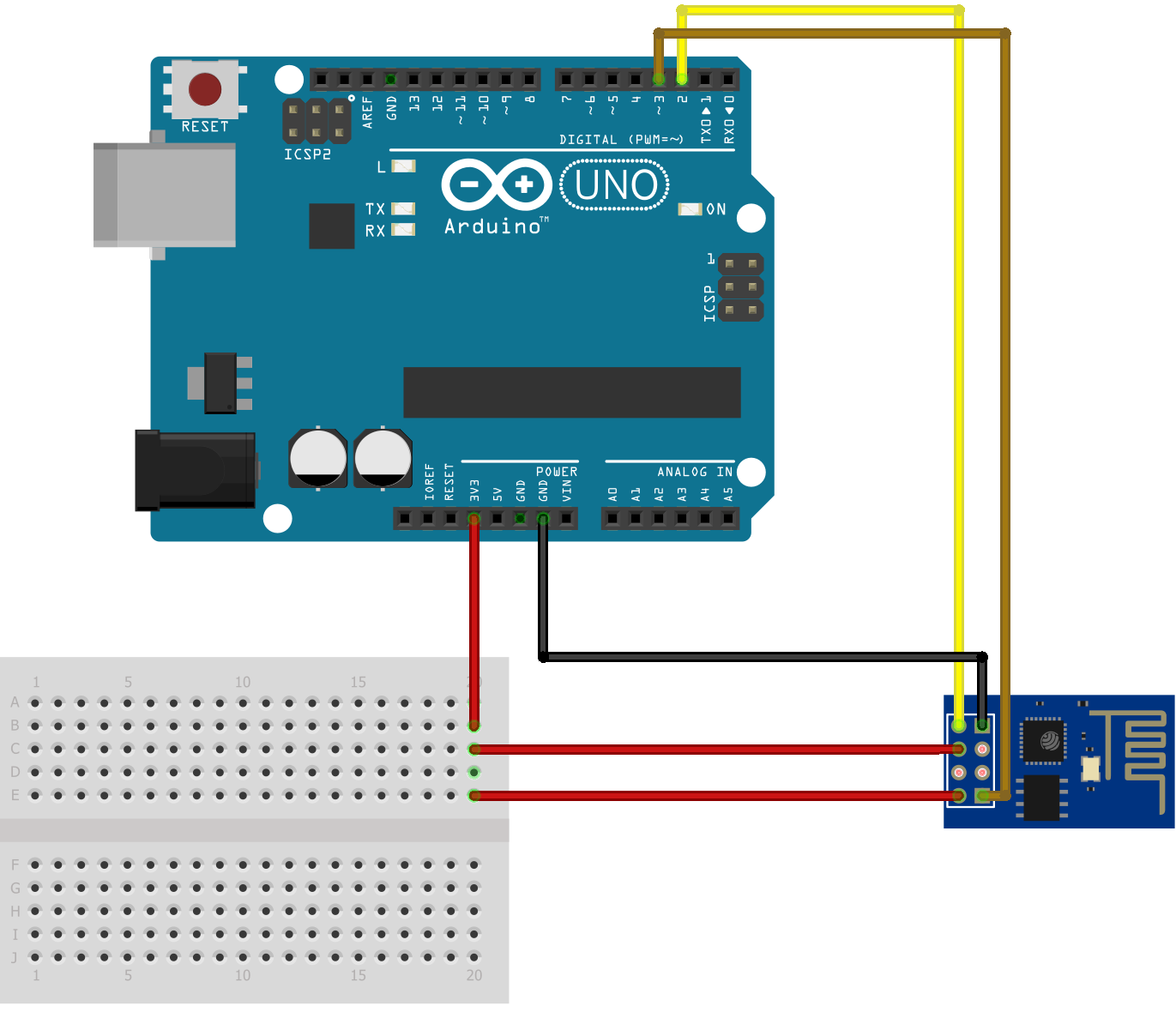
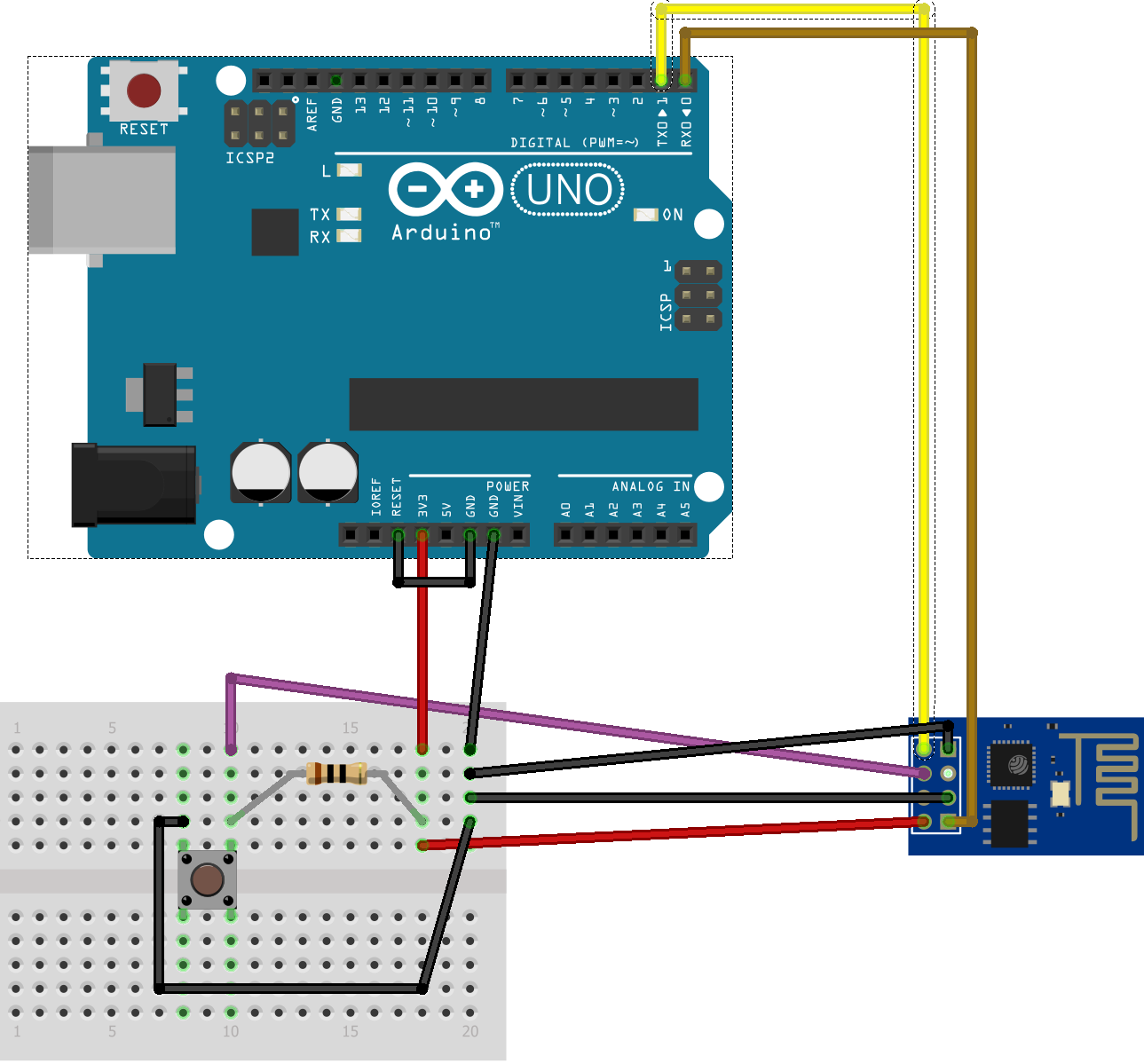
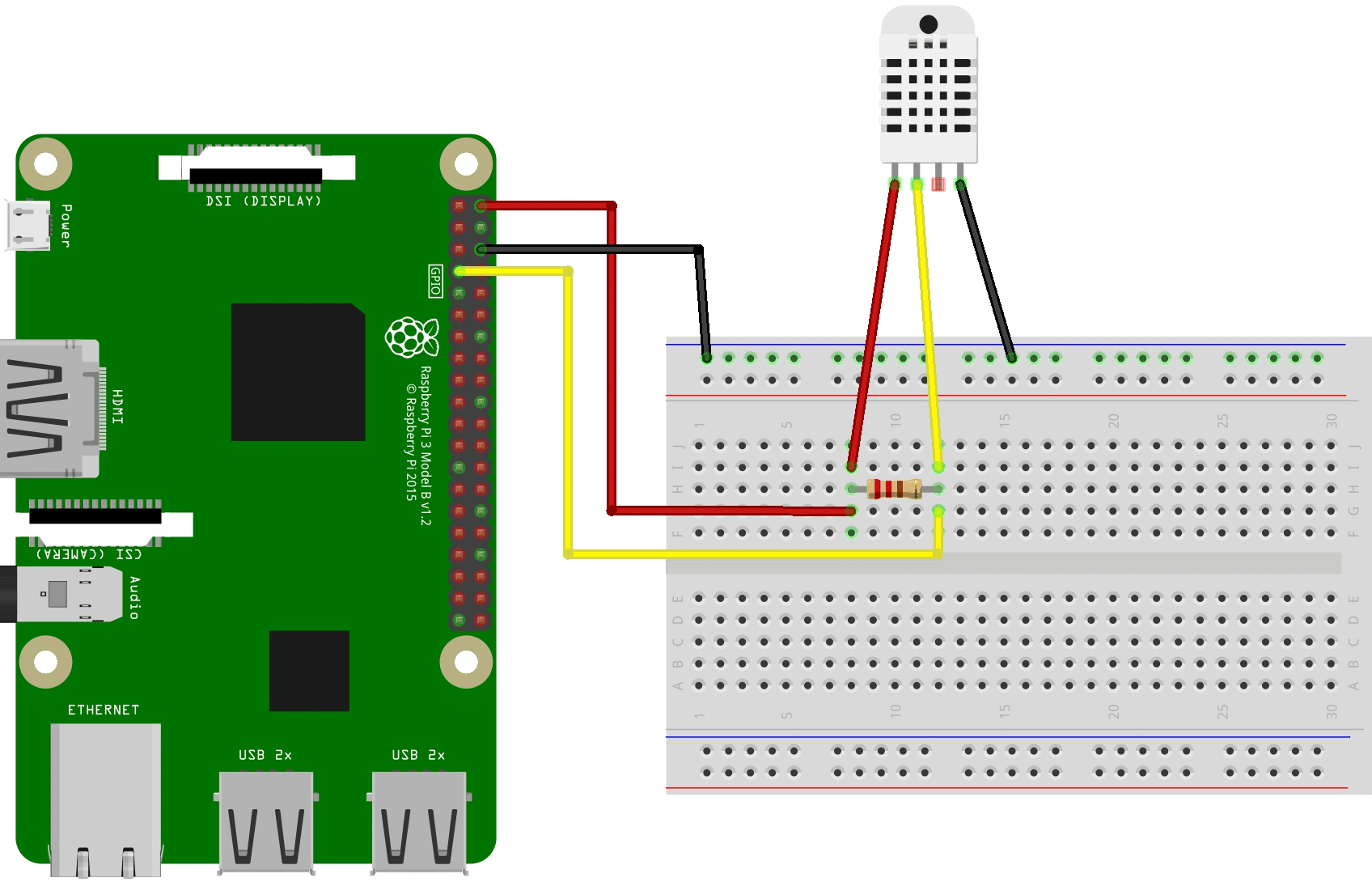
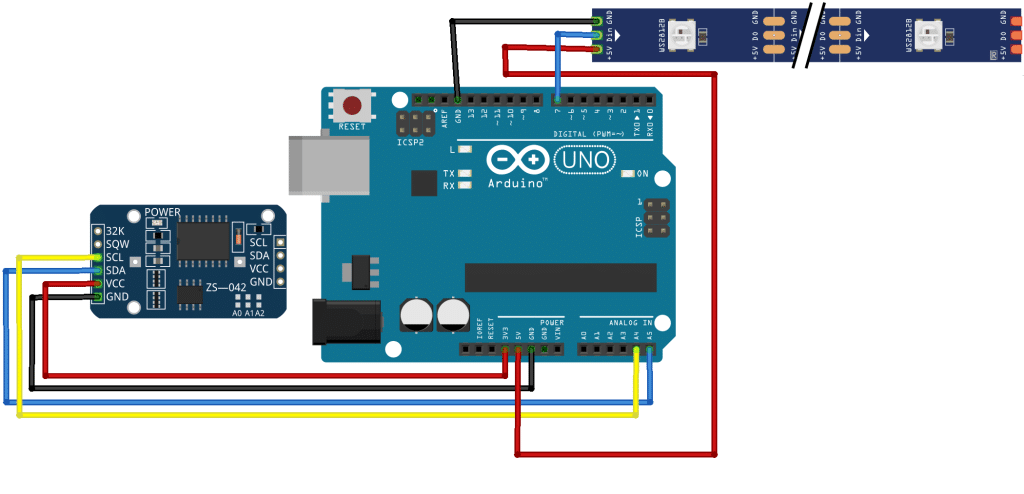
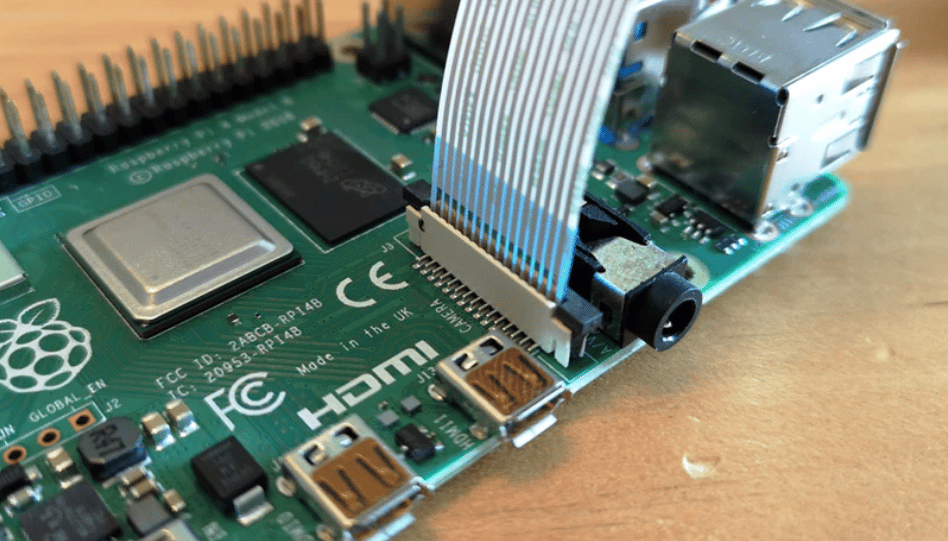
قم بتثبيت الشاشة الكرستالية كما هو ظاهر بالصور عليك الانتباه للمنافذ يجب توصيلها في مكانها الصحيح على لوحة الاردوينو.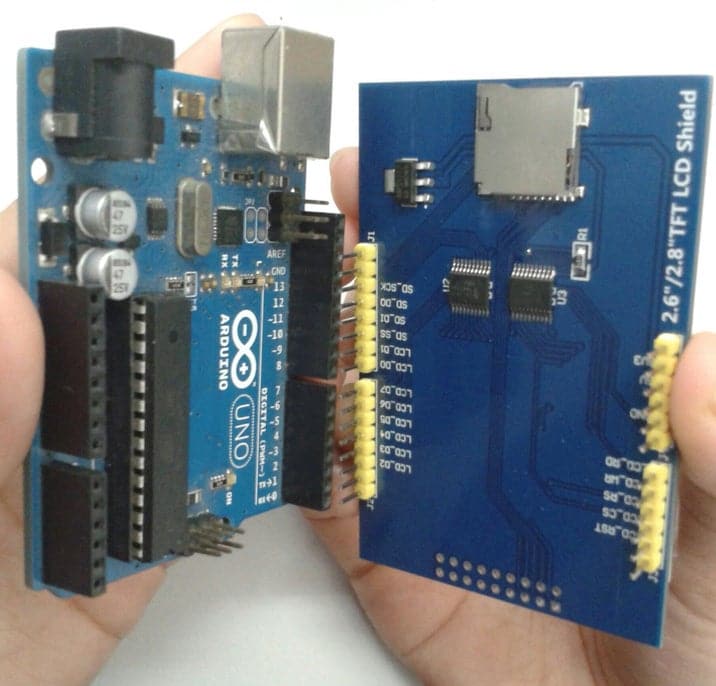
البرمجة
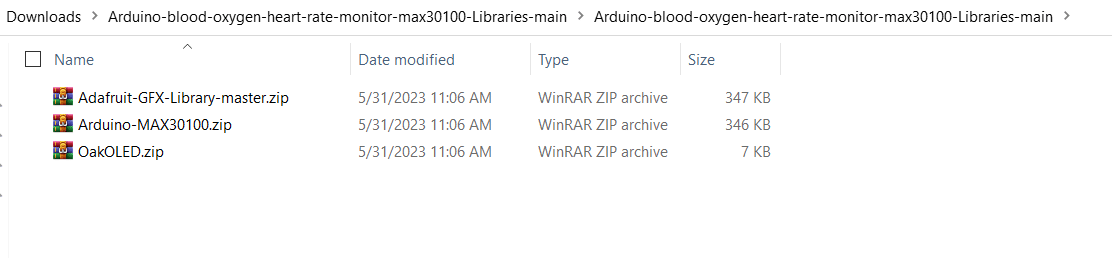
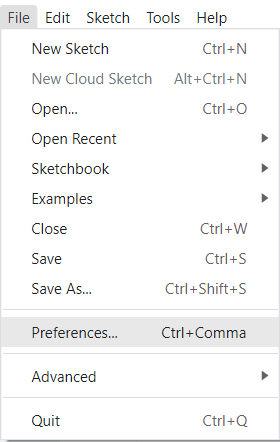
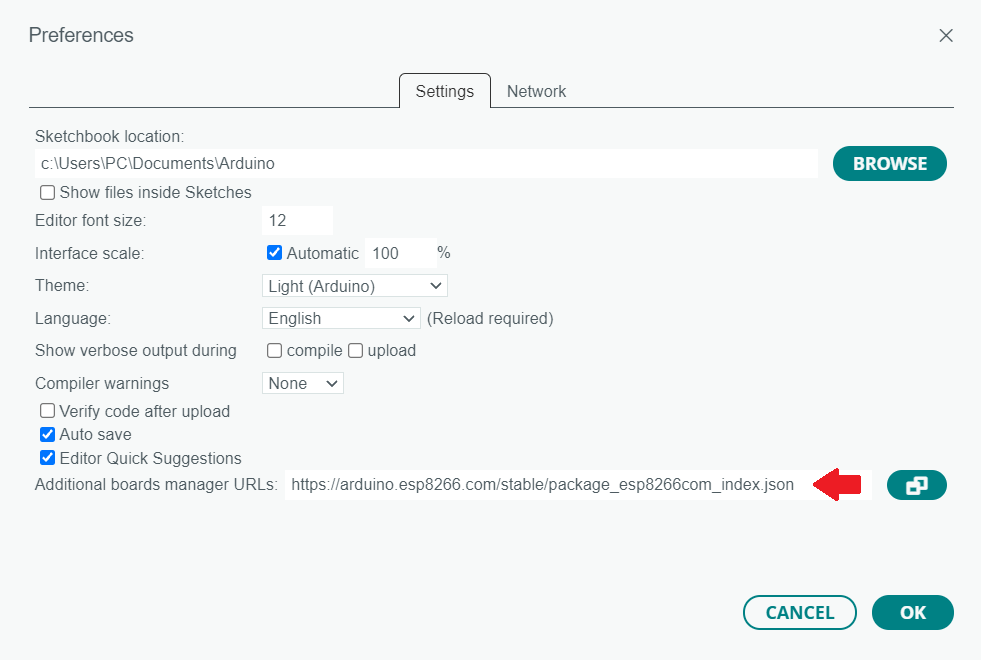
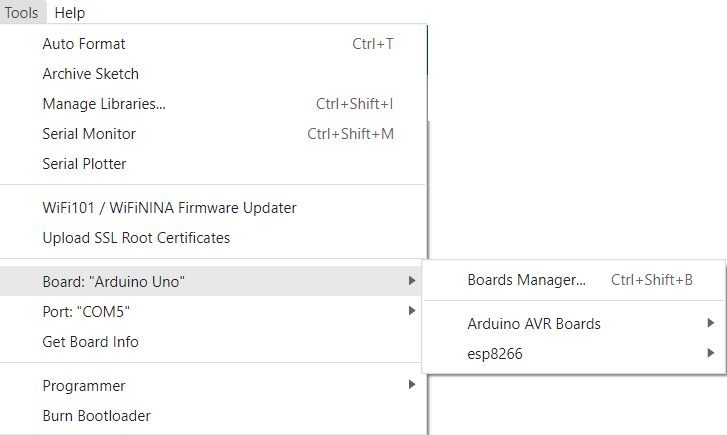
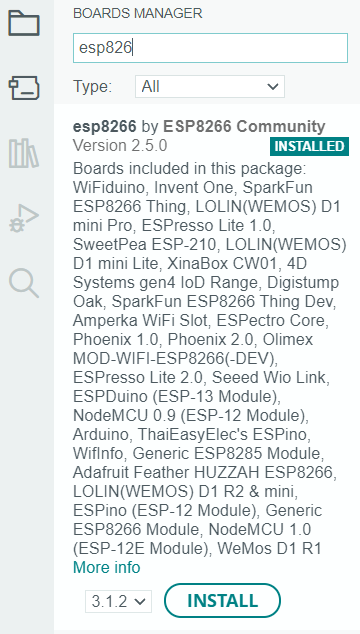
قبل رفع كود مشروع جهاز ألعاب فيديو محمول للوحة الاردوينو عليك تحميل المكتبات الضرورية للمشروع، لمعرفة كيفية تنزيل المكتبات يمكنك الرجوع لدرس التالي.
- مكتبة Touchscreen
- مكتبة Adafruit-GFX-Library
- مكتبة MCUFRIEND_kbv
#include <Adafruit_GFX.h> // Core graphics library
#include <TouchScreen.h>
#include <MCUFRIEND_kbv.h>
#define BLACK 0x0000
#define BLUE 0x001F
#define RED 0xF800
#define GREEN 0x07E0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
#define PRIMARY_COLOR 0x4A11
#define PRIMARY_LIGHT_COLOR 0x7A17
#define PRIMARY_DARK_COLOR 0x4016
#define PRIMARY_TEXT_COLOR 0x7FFF
MCUFRIEND_kbv tft;
#define LOWFLASH (defined(__AVR_ATmega328P__) && defined(MCUFRIEND_KBV_H_))
// Touch screen pressure threshold
#define MINPRESSURE 40
#define MAXPRESSURE 1000
// Touch screen calibration
const int16_t XP = 8, XM = A2, YP = A3, YM = 9; //240x320 ID=0x9341
const int16_t TS_LEFT = 122, TS_RT = 929, TS_TOP = 77, TS_BOT = 884;
const TouchScreen ts = TouchScreen(XP, YP, XM, YM, 300);
#define SCORE_SIZE 30
char scoreFormat[] = "%04d";
typedef struct gameSize_type {
int16_t x, y, width, height;
} gameSize_type;
gameSize_type gameSize;
uint16_t backgroundColor = BLACK;
int level;
const uint8_t BIT_MASK[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};
uint8_t pointsForRow[] = {7, 7, 5, 5, 3, 3 , 1, 1};
#define GAMES_NUMBER 16
typedef struct game_type {
int ballsize;
int playerwidth;
int playerheight;
int exponent;
int top;
int rows;
int columns;
int brickGap;
int lives;
int wall[GAMES_NUMBER];
int initVelx;
int initVely;
} game_type;
game_type games[GAMES_NUMBER] =
// ballsize, playerwidth, playerheight, exponent, top, rows, columns, brickGap, lives, wall[8], initVelx, initVely
{
{ 10, 60, 8, 6, 40 , 8, 8, 3, 3, {0x18, 0x66, 0xFF, 0xDB, 0xFF, 0x7E, 0x24, 0x3C} , 28, -28},
{ 10, 50, 8, 6, 40 , 8, 8, 3, 3, {0xFF, 0x99, 0xFF, 0xE7, 0xBD, 0xDB, 0xE7, 0xFF} , 28, -28},
{ 10, 50, 8, 6, 40 , 8, 8, 3, 3, {0xAA, 0x55, 0xAA, 0x55, 0xAA, 0x55, 0xAA, 0x55} , 28, -28},
{ 8, 50, 8, 6, 40 , 8, 8, 3, 3, {0xFF, 0xC3, 0xC3, 0xC3, 0xC3, 0xC3, 0xC3, 0xFF} , 34, -34},
{ 10, 40, 8, 6, 40 , 8, 8, 3, 3, {0xFF, 0xAA, 0xAA, 0xFF, 0xFF, 0xAA, 0xAA, 0xFF} , 28, -28},
{ 10, 40, 8, 6, 40 , 8, 8, 3, 3, {0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA} , 28, -28},
{ 12, 64, 8, 6, 60 , 4, 2, 3, 4, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 20, -20},
{ 12, 60, 8, 6, 60 , 5, 3, 3, 4, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 22, -22},
{ 10, 56, 8, 6, 30 , 6, 4, 3, 4, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 24, -24},
{ 10, 52, 8, 6, 30 , 7, 5, 3, 4, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 26, -26},
{ 8, 48, 8, 6, 30 , 8, 6, 3, 3, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 28, -28},
{ 8, 44, 8, 6, 30 , 8, 7, 3, 3, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 30, -30},
{ 8, 40, 8, 6, 30 , 8, 8, 3, 3, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 32, -32},
{ 8, 36, 8, 6, 40 , 8, 8, 3, 3, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 34, -34},
{ 8, 36, 8, 6, 40 , 8, 8, 3, 3, {0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA} , 34, -34}
};
game_type* game;
typedef struct game_state_type {
uint16_t ballx;
uint16_t bally;
uint16_t ballxold;
uint16_t ballyold;
int velx;
int vely;
int playerx;
int playerxold;
int wallState[8];
int score;
int remainingLives;
int top;
int bottom;
int walltop;
int wallbottom ;
int brickheight;
int brickwidth;
};
game_state_type state;
//////////////////////////////////////////////////////////////
// ARDUINO SETUP
//////////////////////////////////////////////////////////////
void setup()
{
initTft(tft);
gameSize = {0, 0, tft.width(), tft.height()};
newGame(&games[0], &state, tft);
}
//////////////////////////////////////////////////////////////
// ARDUINO LOOP
//////////////////////////////////////////////////////////////
int selection = -1;
void loop(void)
{
selection = readUiSelection(game, &state, selection);
drawPlayer(game, &state);
// store old position to remove old pixels
state.playerxold = state.playerx;
// calculate new ball position x1 = x0 + vx * dt
// check max speed
if (abs( state.vely) > ((1 << game->exponent) - 1)) {
state.vely = ((1 << game->exponent) - 1) * ((state.vely > 0) - (state.vely < 0));
}
if (abs( state.velx) > ((1 << game->exponent) - 1)) {
state.velx = ((1 << game->exponent) - 1) * ((state.velx > 0) - (state.velx < 0));
}
state.ballx += state.velx;
state.bally += state.vely;
// check ball collisions and exit
checkBallCollisions(game, &state, state.ballx >> game->exponent, state.bally >> game->exponent);
checkBallExit(game, &state, state.ballx >> game->exponent, state.bally >> game->exponent);
// draw ball in new position
drawBall(state.ballx >> game->exponent, state.bally >> game->exponent, state.ballxold >> game->exponent, state.ballyold >> game->exponent, game->ballsize );
// store old position to remove old pixels
state.ballxold = state.ballx;
state.ballyold = state.bally;
// increment velocity
state.velx = (20 + (state.score >> 3 )) * ( (state.velx > 0) - (state.velx < 0));
state.vely = (20 + (state.score >> 3 )) * ( (state.vely > 0) - (state.vely < 0));
// if no bricks go to next level
if (noBricks(game, &state) && level < GAMES_NUMBER) {
level++;
newGame( &games[level], &state, tft);
} else if ( state.remainingLives <= 0) {
gameOverTouchToStart();
state.score = 0;
level = 0;
newGame(game, &state, tft);
}
}
void newGame(game_type* newGame, game_state_type * state, MCUFRIEND_kbv &tft) {
game = newGame;
setupState(game, state, tft);
clearDialog(gameSize);
updateLives(game->lives, state->remainingLives);
updateScore(state->score);
setupWall(game, state);
touchToStart();
clearDialog(gameSize);
updateLives(game->lives, state->remainingLives);
updateScore(state->score);
setupWall(game, state);
}
void setupStateSizes(game_type* game, game_state_type * state, MCUFRIEND_kbv &tft) {
state->bottom = tft.height() - 30;
state->brickwidth = tft.width() / game->columns;
state->brickheight = tft.height() / 24;
}
void setupState(game_type* game, game_state_type * state, MCUFRIEND_kbv &tft) {
setupStateSizes(game, state, tft);
for (int i = 0; i < game->rows ; i ++) {
state->wallState[i] = 0;
}
state->playerx = tft.width() / 2 - game->playerwidth / 2;
state->remainingLives = game->lives;
state->bally = state->bottom << game->exponent;
state->ballyold = state->bottom << game->exponent;
state->velx = game->initVelx;
state->vely = game->initVely;
}
void updateLives(int lives, int remainingLives) {
for (int i = 0; i < lives; i++) {
tft.fillCircle((1 + i) * 15, 15, 5, BLACK);
}
for (int i = 0; i < remainingLives; i++) {
tft.fillCircle((1 + i) * 15, 15, 5, YELLOW);
}
}
void setupWall(game_type * game, game_state_type * state) {
int colors[] = {RED, RED, BLUE, BLUE, YELLOW, YELLOW, GREEN, GREEN};
state->walltop = game->top + 40;
state->wallbottom = state->walltop + game->rows * state->brickheight;
for (int i = 0; i < game->rows; i++) {
for (int j = 0; j < game->columns; j++) {
if (isBrickIn(game->wall, j, i)) {
setBrick(state->wallState, j, i);
drawBrick(state, j, i, colors[i]);
}
}
}
}
void drawBrick(game_state_type * state, int xBrick, int yBrickRow, uint16_t backgroundColor) {
tft.fillRect((state->brickwidth * xBrick) + game->brickGap,
state->walltop + (state->brickheight * yBrickRow) + game->brickGap ,
state->brickwidth - game->brickGap * 2,
state->brickheight - game->brickGap * 2, backgroundColor);
}
boolean noBricks(game_type * game, game_state_type * state) {
for (int i = 0; i < game->rows ; i++) {
if (state->wallState[i]) return false;
}
return true;
}
void drawPlayer(game_type * game, game_state_type * state) {
// paint
tft.fillRect(state->playerx, state->bottom, game->playerwidth, game->playerheight, YELLOW);
if (state->playerx != state->playerxold) {
// remove old pixels
if (state->playerx < state->playerxold) {
tft.fillRect(state->playerx + game->playerwidth, state->bottom, abs(state->playerx - state->playerxold), game->playerheight, backgroundColor);
}
else {
tft.fillRect(state->playerxold, state->bottom, abs(state->playerx - state->playerxold), game->playerheight, backgroundColor);
}
}
}
void drawBall(int x, int y, int xold, int yold, int ballsize) {
// remove old pixels
//if (xold != x && yold != y) {
if (xold <= x && yold <= y) {
tft.fillRect(xold , yold, ballsize, y - yold, BLACK);
tft.fillRect(xold , yold, x - xold, ballsize, BLACK);
} else if (xold >= x && yold >= y) {
tft.fillRect(x + ballsize , yold, xold - x, ballsize, BLACK);
tft.fillRect(xold , y + ballsize, ballsize, yold - y, BLACK);
} else if (xold <= x && yold >= y) {
tft.fillRect(xold , yold, x - xold, ballsize, BLACK);
tft.fillRect(xold , y + ballsize, ballsize, yold - y, BLACK);
} else if (xold >= x && yold <= y) {
tft.fillRect(xold , yold, ballsize, y - yold, BLACK);
tft.fillRect(x + ballsize, yold, xold - x, ballsize, BLACK);
}
// paint new ball
tft.fillRect(x , y, ballsize, ballsize, YELLOW);
// }
}
void touchToStart() {
drawBoxedString(0, 200, " BREAKOUT", 3, YELLOW, BLACK);
drawBoxedString(0, 240, " TOUCH TO START", 2, RED, BLACK);
while (waitForTouch() < 0) {}
}
void gameOverTouchToStart() {
drawBoxedString(0, 180, " GAME OVER", 3, YELLOW, BLACK);
drawBoxedString(0, 220, " TOUCH TO START", 2, RED, BLACK);
while (waitForTouch() < 0) {}
}
void updateScore (int score) {
char buffer[5];
snprintf(buffer, sizeof(buffer), scoreFormat, score);
drawBoxedString(tft.width() - 50, 6, buffer, 2, YELLOW, PRIMARY_DARK_COLOR);
}
void checkBrickCollision(game_type* game, game_state_type * state, uint16_t x, uint16_t y) {
int x1 = x + game->ballsize;
int y1 = y + game->ballsize;
int collissions = 0;
collissions += checkCornerCollision(game, state, x, y);
collissions += checkCornerCollision(game, state, x1, y1);
collissions += checkCornerCollision(game, state, x, y1);
collissions += checkCornerCollision(game, state, x1, y);
if (collissions > 0 ) {
state->vely = (-1 * state->vely);
if ((((x % state->brickwidth) == 0) && ( state->velx < 0 ))
|| ((((x + game->ballsize) % state->brickwidth) == 0) && ( state->velx > 0 )) ) {
state->velx = (-1 * state->velx);
}
}
}
int checkCornerCollision(game_type * game, game_state_type * state, uint16_t x, uint16_t y) {
if ((y > state->walltop) && (y < state->wallbottom)) {
int yBrickRow = ( y - state->walltop) / state->brickheight;
int xBrickColumn = (x / state->brickwidth);
if (isBrickIn(state->wallState, xBrickColumn, yBrickRow) ) {
hitBrick(state, xBrickColumn, yBrickRow);
return 1;
}
}
return 0;
}
void hitBrick(game_state_type * state, int xBrick, int yBrickRow) {
state->score += pointsForRow[yBrickRow];
drawBrick(state, xBrick, yBrickRow, WHITE);
delay(16);
drawBrick(state, xBrick, yBrickRow, BLUE);
delay(8);
drawBrick(state, xBrick, yBrickRow, backgroundColor);
unsetBrick(state->wallState, xBrick, yBrickRow);
updateScore(state->score);
}
void checkBorderCollision(game_type * game, game_state_type * state, uint16_t x, uint16_t y) {
// check wall collision
if (x + game->ballsize >= tft.width()) {
state->velx = -abs(state->velx);
}
if (x <= 0 ) {
state->velx = abs(state->velx);
}
if (y <= SCORE_SIZE ) {
state->vely = abs(state->vely);
}
if (((y + game->ballsize) >= state->bottom)
&& ((y + game->ballsize) <= (state->bottom + game->playerheight))
&& (x >= state->playerx)
&& (x <= (state->playerx + game->playerwidth))) {
// change vel x near player borders
if (x > (state->playerx + game->playerwidth - 6)) {
state->velx = state->velx - 1;
} else if (x < state->playerx + 6) {
state->velx = state->velx + 1;
}
state->vely = -abs(state->vely) ;
}
}
void checkBallCollisions(game_type * game, game_state_type * state, uint16_t x, uint16_t y) {
checkBrickCollision(game, state, x, y);
checkBorderCollision(game, state, x, y);
}
void checkBallExit(game_type * game, game_state_type * state, uint16_t x, uint16_t y) {
if (((y + game->ballsize) >= tft.height())) {
state->remainingLives--;
updateLives(game->lives, state->remainingLives);
delay(500);
state->vely = -abs(state->vely) ;
}
}
void setBrick(int wall[], uint8_t x, uint8_t y) {
wall[y] = wall[y] | BIT_MASK[x];
}
void unsetBrick(int wall[], uint8_t x, uint8_t y) {
wall[y] = wall[y] & ~BIT_MASK[x];
}
boolean isBrickIn(int wall[], uint8_t x, uint8_t y) {
return wall[y] & BIT_MASK[x];
}
//////////////////////////////////////////////////////////////
// TFT SETUP
//////////////////////////////////////////////////////////////
void initTft(MCUFRIEND_kbv & tft) {
tft.reset();
uint16_t ID = tft.readID();
tft.begin(ID);
tft.setRotation(0);
}//////////////////////////////////////////////////////////////
// Screen Painting methods
//////////////////////////////////////////////////////////////
/**
Print a text in forecolor over a filled box with background color.
Rectangle size is calculated to include the whole text without margins
@param x horizontal coordinate in points left upper corner
@param y vertical coordinate in points left upper corner
@param fontsize font size of the text to print
@param foreColor forecolor of the text to print
@param backgroundColor color of the filled rect
@return void
*/
void drawBoxedString(const uint16_t x, const uint16_t y, const char* string, const uint16_t fontsize, const uint16_t foreColor, const uint16_t backgroundColor) {
tft.setTextSize(fontsize);
int16_t x1, y1;
uint16_t w, h;
tft.getTextBounds(string, x, y, &x1, &y1, &w, &h);
tft.fillRect(x, y, w, h, backgroundColor);
tft.setCursor(x, y);
tft.setTextColor(foreColor);
tft.print(string);
}/**
Clear the screen to the default backgrounds
@param void
@return void
*/
void clearDialog(gameSize_type gameSize) {
tft.fillRect(gameSize.x, gameSize.y, gameSize.width, gameSize.height, backgroundColor);
tft.fillRect(gameSize.x, gameSize.y, gameSize.width, SCORE_SIZE, PRIMARY_DARK_COLOR);
}
//////////////////////////////////////////////////////////////
// READ UI SELECTION
//////////////////////////////////////////////////////////////
/*
Checks if the user is selecting any of the visible enabled ui elements
The onTap callback of the selected element is called and it set as pressed
@param lastSelected the last selection
@return the new selection
*/
int readUiSelection(game_type * game, game_state_type * state, const int16_t lastSelected ) {
int16_t xpos, ypos; //screen coordinates
TSPoint tp = ts.getPoint(); //tp.x, tp.y are ADC values
// if sharing pins, you'll need to fix the directions of the touchscreen pins
pinMode(XM, OUTPUT);
pinMode(YP, OUTPUT);
// we have some minimum pressure we consider 'valid'
// pressure of 0 means no pressing!
if (tp.z > MINPRESSURE && tp.z < MAXPRESSURE) {
xpos = map(tp.x, TS_RT, TS_LEFT, 0, tft.width());
ypos = map(tp.y, TS_BOT, TS_TOP, 0, tft.height());
// are we in buttons area ?
if (xpos > tft.width() / 2) {
state->playerx += 2;
} else {
state->playerx -= 2;
}
if (state->playerx >= tft.width() - game->playerwidth) state->playerx = tft.width() - game->playerwidth;
if (state->playerx < 0) state->playerx = 0;
return 1;
}
#ifdef DEMO_MODE
state->playerx = (state->ballx >> game->exponent) - game->playerwidth / 2;
if (state->playerx >= tft.width() - game->playerwidth) state->playerx = tft.width() - game->playerwidth;
if (state->playerx < 0) state->playerx = 0;
#endif
return -1;
}
int waitForTouch() {
int16_t xpos, ypos; //screen coordinates
TSPoint tp = ts.getPoint(); //tp.x, tp.y are ADC values
// if sharing pins, you'll need to fix the directions of the touchscreen pins
pinMode(XM, OUTPUT);
pinMode(YP, OUTPUT);
// we have some minimum pressure we consider 'valid'
// pressure of 0 means no pressing!
if (tp.z > MINPRESSURE && tp.z < MAXPRESSURE) {
return 1;
}
return -1;
}
شرح الكود البرمجي
نستدعي المكتبات الضروية للشاشة الكرستالية مثل مكتبة Adafruit_GFX.h و TouchScreen.h و MCUFRIEND_kbv.h.
#include <Adafruit_GFX.h> // Core graphics library
#include <TouchScreen.h>
#include <MCUFRIEND_kbv.h>
نهيئ المتغيرات التي سنحتاجها في اللعبة مثل متغيرات الشاشة الكرستالية ومتغيرات لألوان الشاشة ومواقع اللاعب ومواقع اللبنات.
#define BLACK 0x0000
#define BLUE 0x001F
#define RED 0xF800
#define GREEN 0x07E0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
#define PRIMARY_COLOR 0x4A11
#define PRIMARY_LIGHT_COLOR 0x7A17
#define PRIMARY_DARK_COLOR 0x4016
#define PRIMARY_TEXT_COLOR 0x7FFF
MCUFRIEND_kbv tft;
#define LOWFLASH (defined(__AVR_ATmega328P__) && defined(MCUFRIEND_KBV_H_))
// Touch screen pressure threshold
#define MINPRESSURE 40
#define MAXPRESSURE 1000
// Touch screen calibration
const int16_t XP = 8, XM = A2, YP = A3, YM = 9; //240x320 ID=0x9341
const int16_t TS_LEFT = 122, TS_RT = 929, TS_TOP = 77, TS_BOT = 884;
const TouchScreen ts = TouchScreen(XP, YP, XM, YM, 300);
#define SCORE_SIZE 30
char scoreFormat[] = "%04d";
typedef struct gameSize_type {
int16_t x, y, width, height;
} gameSize_type;
gameSize_type gameSize;
uint16_t backgroundColor = BLACK;
int level;
const uint8_t BIT_MASK[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};
uint8_t pointsForRow[] = {7, 7, 5, 5, 3, 3 , 1, 1};
#define GAMES_NUMBER 16
typedef struct game_type {
int ballsize;
int playerwidth;
int playerheight;
int exponent;
int top;
int rows;
int columns;
int brickGap;
int lives;
int wall[GAMES_NUMBER];
int initVelx;
int initVely;
} game_type;
game_type games[GAMES_NUMBER] =
// ballsize, playerwidth, playerheight, exponent, top, rows, columns, brickGap, lives, wall[8], initVelx, initVely
{
{ 10, 60, 8, 6, 40 , 8, 8, 3, 3, {0x18, 0x66, 0xFF, 0xDB, 0xFF, 0x7E, 0x24, 0x3C} , 28, -28},
{ 10, 50, 8, 6, 40 , 8, 8, 3, 3, {0xFF, 0x99, 0xFF, 0xE7, 0xBD, 0xDB, 0xE7, 0xFF} , 28, -28},
{ 10, 50, 8, 6, 40 , 8, 8, 3, 3, {0xAA, 0x55, 0xAA, 0x55, 0xAA, 0x55, 0xAA, 0x55} , 28, -28},
{ 8, 50, 8, 6, 40 , 8, 8, 3, 3, {0xFF, 0xC3, 0xC3, 0xC3, 0xC3, 0xC3, 0xC3, 0xFF} , 34, -34},
{ 10, 40, 8, 6, 40 , 8, 8, 3, 3, {0xFF, 0xAA, 0xAA, 0xFF, 0xFF, 0xAA, 0xAA, 0xFF} , 28, -28},
{ 10, 40, 8, 6, 40 , 8, 8, 3, 3, {0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA} , 28, -28},
{ 12, 64, 8, 6, 60 , 4, 2, 3, 4, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 20, -20},
{ 12, 60, 8, 6, 60 , 5, 3, 3, 4, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 22, -22},
{ 10, 56, 8, 6, 30 , 6, 4, 3, 4, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 24, -24},
{ 10, 52, 8, 6, 30 , 7, 5, 3, 4, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 26, -26},
{ 8, 48, 8, 6, 30 , 8, 6, 3, 3, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 28, -28},
{ 8, 44, 8, 6, 30 , 8, 7, 3, 3, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 30, -30},
{ 8, 40, 8, 6, 30 , 8, 8, 3, 3, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 32, -32},
{ 8, 36, 8, 6, 40 , 8, 8, 3, 3, {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF} , 34, -34},
{ 8, 36, 8, 6, 40 , 8, 8, 3, 3, {0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA, 0xAA} , 34, -34}
};
game_type* game;
typedef struct game_state_type {
uint16_t ballx;
uint16_t bally;
uint16_t ballxold;
uint16_t ballyold;
int velx;
int vely;
int playerx;
int playerxold;
int wallState[8];
int score;
int remainingLives;
int top;
int bottom;
int walltop;
int wallbottom ;
int brickheight;
int brickwidth;
};
game_state_type state;
في الدالة setup نعين القيمة الصفر للمتغيرات حتى يبدأ اللاعب باللعب حينها تتغير القيم.
void setup()
{
initTft(tft);
gameSize = {0, 0, tft.width(), tft.height()};
newGame(&games[0], &state, tft);
}
في الدالة loop يتم رسم الخلفية للعبة ورسم اللاعب وموقعه ورسم الطوب بأشكال وألوان مختلفة ومواقع مختلفة.
أيضًا يتم تهيئة واجهات اللعبة وتعيين الدوال المسؤولة عن حساب المحاولات وحساب عدد اللبنات المحطمة.
void loop(void)
{
selection = readUiSelection(game, &state, selection);
drawPlayer(game, &state);
// store old position to remove old pixels
state.playerxold = state.playerx;
// calculate new ball position x1 = x0 + vx * dt
// check max speed
if (abs( state.vely) > ((1 << game->exponent) - 1)) {
state.vely = ((1 << game->exponent) - 1) * ((state.vely > 0) - (state.vely < 0));
}
if (abs( state.velx) > ((1 << game->exponent) - 1)) {
state.velx = ((1 << game->exponent) - 1) * ((state.velx > 0) - (state.velx < 0));
}
state.ballx += state.velx;
state.bally += state.vely;
// check ball collisions and exit
checkBallCollisions(game, &state, state.ballx >> game->exponent, state.bally >> game->exponent);
checkBallExit(game, &state, state.ballx >> game->exponent, state.bally >> game->exponent);
// draw ball in new position
drawBall(state.ballx >> game->exponent, state.bally >> game->exponent, state.ballxold >> game->exponent, state.ballyold >> game->exponent, game->ballsize );
// store old position to remove old pixels
state.ballxold = state.ballx;
state.ballyold = state.bally;
// increment velocity
state.velx = (20 + (state.score >> 3 )) * ( (state.velx > 0) - (state.velx < 0));
state.vely = (20 + (state.score >> 3 )) * ( (state.vely > 0) - (state.vely < 0));
// if no bricks go to next level
if (noBricks(game, &state) && level < GAMES_NUMBER) {
level++;
newGame( &games[level], &state, tft);
} else if ( state.remainingLives <= 0) {
gameOverTouchToStart();
state.score = 0;
level = 0;
newGame(game, &state, tft);
}
}
void newGame(game_type* newGame, game_state_type * state, MCUFRIEND_kbv &tft) {
game = newGame;
setupState(game, state, tft);
clearDialog(gameSize);
updateLives(game->lives, state->remainingLives);
updateScore(state->score);
setupWall(game, state);
touchToStart();
clearDialog(gameSize);
updateLives(game->lives, state->remainingLives);
updateScore(state->score);
setupWall(game, state);
}
void setupStateSizes(game_type* game, game_state_type * state, MCUFRIEND_kbv &tft) {
state->bottom = tft.height() - 30;
state->brickwidth = tft.width() / game->columns;
state->brickheight = tft.height() / 24;
}
void setupState(game_type* game, game_state_type * state, MCUFRIEND_kbv &tft) {
setupStateSizes(game, state, tft);
for (int i = 0; i < game->rows ; i ++) {
state->wallState[i] = 0;
}
state->playerx = tft.width() / 2 - game->playerwidth / 2;
state->remainingLives = game->lives;
state->bally = state->bottom << game->exponent;
state->ballyold = state->bottom << game->exponent;
state->velx = game->initVelx;
state->vely = game->initVely;
}
void updateLives(int lives, int remainingLives) {
for (int i = 0; i < lives; i++) {
tft.fillCircle((1 + i) * 15, 15, 5, BLACK);
}
for (int i = 0; i < remainingLives; i++) {
tft.fillCircle((1 + i) * 15, 15, 5, YELLOW);
}
}
void setupWall(game_type * game, game_state_type * state) {
int colors[] = {RED, RED, BLUE, BLUE, YELLOW, YELLOW, GREEN, GREEN};
state->walltop = game->top + 40;
state->wallbottom = state->walltop + game->rows * state->brickheight;
for (int i = 0; i < game->rows; i++) {
for (int j = 0; j < game->columns; j++) {
if (isBrickIn(game->wall, j, i)) {
setBrick(state->wallState, j, i);
drawBrick(state, j, i, colors[i]);
}
}
}
}
void drawBrick(game_state_type * state, int xBrick, int yBrickRow, uint16_t backgroundColor) {
tft.fillRect((state->brickwidth * xBrick) + game->brickGap,
state->walltop + (state->brickheight * yBrickRow) + game->brickGap ,
state->brickwidth - game->brickGap * 2,
state->brickheight - game->brickGap * 2, backgroundColor);
}
boolean noBricks(game_type * game, game_state_type * state) {
for (int i = 0; i < game->rows ; i++) {
if (state->wallState[i]) return false;
}
return true;
}
void drawPlayer(game_type * game, game_state_type * state) {
// paint
tft.fillRect(state->playerx, state->bottom, game->playerwidth, game->playerheight, YELLOW);
if (state->playerx != state->playerxold) {
// remove old pixels
if (state->playerx < state->playerxold) {
tft.fillRect(state->playerx + game->playerwidth, state->bottom, abs(state->playerx - state->playerxold), game->playerheight, backgroundColor);
}
else {
tft.fillRect(state->playerxold, state->bottom, abs(state->playerx - state->playerxold), game->playerheight, backgroundColor);
}
}
}
void drawBall(int x, int y, int xold, int yold, int ballsize) {
// remove old pixels
//if (xold != x && yold != y) {
if (xold <= x && yold <= y) {
tft.fillRect(xold , yold, ballsize, y - yold, BLACK);
tft.fillRect(xold , yold, x - xold, ballsize, BLACK);
} else if (xold >= x && yold >= y) {
tft.fillRect(x + ballsize , yold, xold - x, ballsize, BLACK);
tft.fillRect(xold , y + ballsize, ballsize, yold - y, BLACK);
} else if (xold <= x && yold >= y) {
tft.fillRect(xold , yold, x - xold, ballsize, BLACK);
tft.fillRect(xold , y + ballsize, ballsize, yold - y, BLACK);
} else if (xold >= x && yold <= y) {
tft.fillRect(xold , yold, ballsize, y - yold, BLACK);
tft.fillRect(x + ballsize, yold, xold - x, ballsize, BLACK);
}
// paint new ball
tft.fillRect(x , y, ballsize, ballsize, YELLOW);
// }
}
void touchToStart() {
drawBoxedString(0, 200, " BREAKOUT", 3, YELLOW, BLACK);
drawBoxedString(0, 240, " TOUCH TO START", 2, RED, BLACK);
while (waitForTouch() < 0) {}
}
void gameOverTouchToStart() {
drawBoxedString(0, 180, " GAME OVER", 3, YELLOW, BLACK);
drawBoxedString(0, 220, " TOUCH TO START", 2, RED, BLACK);
while (waitForTouch() < 0) {}
}
void updateScore (int score) {
char buffer[5];
snprintf(buffer, sizeof(buffer), scoreFormat, score);
drawBoxedString(tft.width() - 50, 6, buffer, 2, YELLOW, PRIMARY_DARK_COLOR);
}
void checkBrickCollision(game_type* game, game_state_type * state, uint16_t x, uint16_t y) {
int x1 = x + game->ballsize;
int y1 = y + game->ballsize;
int collissions = 0;
collissions += checkCornerCollision(game, state, x, y);
collissions += checkCornerCollision(game, state, x1, y1);
collissions += checkCornerCollision(game, state, x, y1);
collissions += checkCornerCollision(game, state, x1, y);
if (collissions > 0 ) {
tone(BUZZER_PORT, NOTE_A3, 4);
state->vely = (-1 * state->vely);
if ((((x % state->brickwidth) == 0) && ( state->velx < 0 ))
|| ((((x + game->ballsize) % state->brickwidth) == 0) && ( state->velx > 0 )) ) {
state->velx = (-1 * state->velx);
}
}
}
int checkCornerCollision(game_type * game, game_state_type * state, uint16_t x, uint16_t y) {
if ((y > state->walltop) && (y < state->wallbottom)) {
int yBrickRow = ( y - state->walltop) / state->brickheight;
int xBrickColumn = (x / state->brickwidth);
if (isBrickIn(state->wallState, xBrickColumn, yBrickRow) ) {
hitBrick(state, xBrickColumn, yBrickRow);
return 1;
}
}
return 0;
}
void hitBrick(game_state_type * state, int xBrick, int yBrickRow) {
state->score += pointsForRow[yBrickRow];
drawBrick(state, xBrick, yBrickRow, WHITE);
delay(16);
drawBrick(state, xBrick, yBrickRow, BLUE);
delay(8);
drawBrick(state, xBrick, yBrickRow, backgroundColor);
unsetBrick(state->wallState, xBrick, yBrickRow);
updateScore(state->score);
}
void checkBorderCollision(game_type * game, game_state_type * state, uint16_t x, uint16_t y) {
// check wall collision
if (x + game->ballsize >= tft.width()) {
state->velx = -abs(state->velx);
tone(BUZZER_PORT, NOTE_D4, 16);
}
if (x <= 0 ) {
state->velx = abs(state->velx);
tone(BUZZER_PORT, NOTE_D4, 16);
}
if (y <= SCORE_SIZE ) {
state->vely = abs(state->vely);
tone(BUZZER_PORT, NOTE_D4, 16);
}
if (((y + game->ballsize) >= state->bottom)
&& ((y + game->ballsize) <= (state->bottom + game->playerheight))
&& (x >= state->playerx)
&& (x <= (state->playerx + game->playerwidth))) {
// change vel x near player borders
if (x > (state->playerx + game->playerwidth - 6)) {
state->velx = state->velx - 1;
} else if (x < state->playerx + 6) {
state->velx = state->velx + 1;
}
state->vely = -abs(state->vely) ;
tone(BUZZER_PORT, NOTE_B5, 16);
}
}
void checkBallCollisions(game_type * game, game_state_type * state, uint16_t x, uint16_t y) {
checkBrickCollision(game, state, x, y);
checkBorderCollision(game, state, x, y);
}
void checkBallExit(game_type * game, game_state_type * state, uint16_t x, uint16_t y) {
if (((y + game->ballsize) >= tft.height())) {
state->remainingLives--;
updateLives(game->lives, state->remainingLives);
delay(500);
state->vely = -abs(state->vely) ;
}
}
void setBrick(int wall[], uint8_t x, uint8_t y) {
wall[y] = wall[y] | BIT_MASK[x];
}
void unsetBrick(int wall[], uint8_t x, uint8_t y) {
wall[y] = wall[y] & ~BIT_MASK[x];
}
boolean isBrickIn(int wall[], uint8_t x, uint8_t y) {
return wall[y] & BIT_MASK[x];
}
//////////////////////////////////////////////////////////////
// TFT SETUP
//////////////////////////////////////////////////////////////
void initTft(MCUFRIEND_kbv & tft) {
tft.reset();
uint16_t ID = tft.readID();
tft.begin(ID);
tft.setRotation(0);
}//////////////////////////////////////////////////////////////
// Screen Painting methods
//////////////////////////////////////////////////////////////
/**
Print a text in forecolor over a filled box with background color.
Rectangle size is calculated to include the whole text without margins
@param x horizontal coordinate in points left upper corner
@param y vertical coordinate in points left upper corner
@param fontsize font size of the text to print
@param foreColor forecolor of the text to print
@param backgroundColor color of the filled rect
@return void
*/
void drawBoxedString(const uint16_t x, const uint16_t y, const char* string, const uint16_t fontsize, const uint16_t foreColor, const uint16_t backgroundColor) {
tft.setTextSize(fontsize);
int16_t x1, y1;
uint16_t w, h;
tft.getTextBounds(string, x, y, &x1, &y1, &w, &h);
tft.fillRect(x, y, w, h, backgroundColor);
tft.setCursor(x, y);
tft.setTextColor(foreColor);
tft.print(string);
}/**
Clear the screen to the default backgrounds
@param void
@return void
*/
void clearDialog(gameSize_type gameSize) {
tft.fillRect(gameSize.x, gameSize.y, gameSize.width, gameSize.height, backgroundColor);
tft.fillRect(gameSize.x, gameSize.y, gameSize.width, SCORE_SIZE, PRIMARY_DARK_COLOR);
}
//////////////////////////////////////////////////////////////
// READ UI SELECTION
//////////////////////////////////////////////////////////////
/*
Checks if the user is selecting any of the visible enabled ui elements
The onTap callback of the selected element is called and it set as pressed
@param lastSelected the last selection
@return the new selection
*/
int readUiSelection(game_type * game, game_state_type * state, const int16_t lastSelected ) {
int16_t xpos, ypos; //screen coordinates
TSPoint tp = ts.getPoint(); //tp.x, tp.y are ADC values
// if sharing pins, you'll need to fix the directions of the touchscreen pins
pinMode(XM, OUTPUT);
pinMode(YP, OUTPUT);
// we have some minimum pressure we consider 'valid'
// pressure of 0 means no pressing!
if (tp.z > MINPRESSURE && tp.z < MAXPRESSURE) {
xpos = map(tp.x, TS_RT, TS_LEFT, 0, tft.width());
ypos = map(tp.y, TS_BOT, TS_TOP, 0, tft.height());
// are we in buttons area ?
if (xpos > tft.width() / 2) {
state->playerx += 2;
} else {
state->playerx -= 2;
}
if (state->playerx >= tft.width() - game->playerwidth) state->playerx = tft.width() - game->playerwidth;
if (state->playerx < 0) state->playerx = 0;
return 1;
}
#ifdef DEMO_MODE
state->playerx = (state->ballx >> game->exponent) - game->playerwidth / 2;
if (state->playerx >= tft.width() - game->playerwidth) state->playerx = tft.width() - game->playerwidth;
if (state->playerx < 0) state->playerx = 0;
#endif
return -1;
}
int waitForTouch() {
int16_t xpos, ypos; //screen coordinates
TSPoint tp = ts.getPoint(); //tp.x, tp.y are ADC values
// if sharing pins, you'll need to fix the directions of the touchscreen pins
pinMode(XM, OUTPUT);
pinMode(YP, OUTPUT);
// we have some minimum pressure we consider 'valid'
// pressure of 0 means no pressing!
if (tp.z > MINPRESSURE && tp.z < MAXPRESSURE) {
return 1;
}
return -1;
}
بعد ذلك ارفع الكود البرمجي للوحة الاردوينو.
شرح خطوات اللعبة
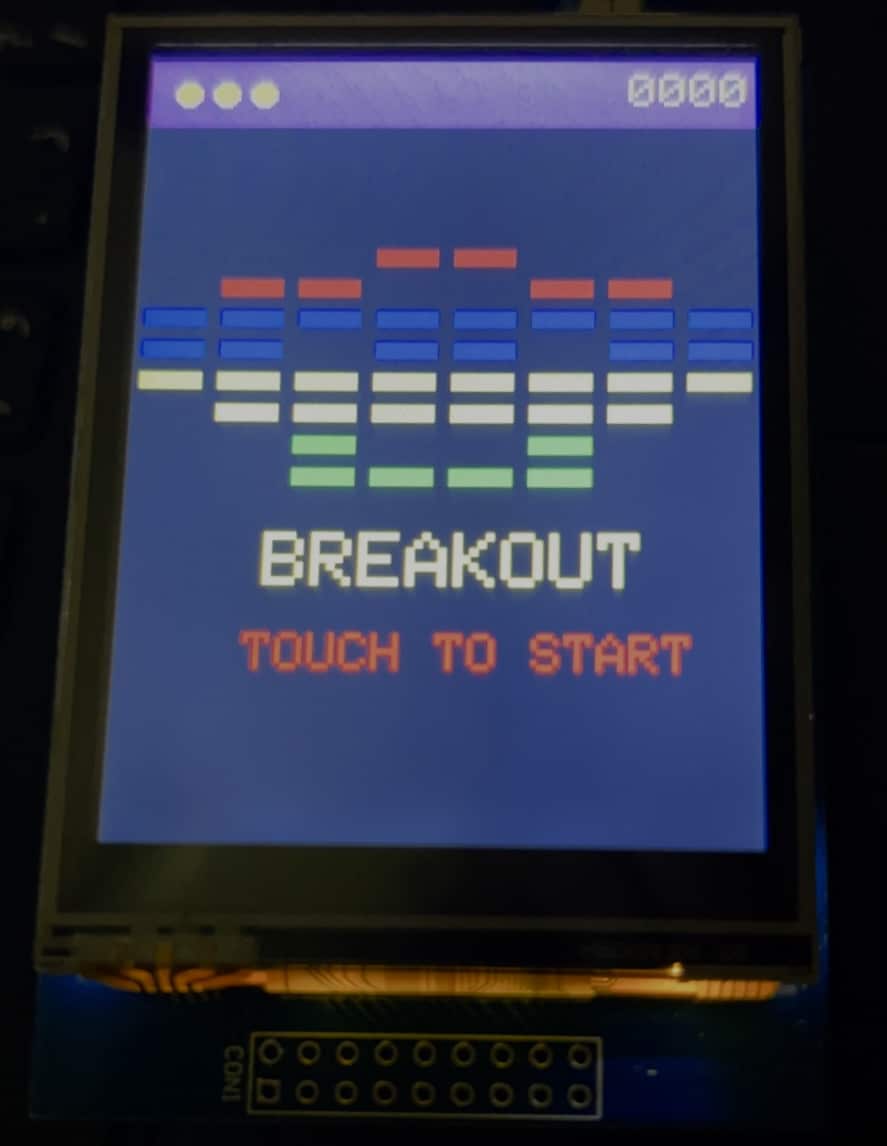
اللعبة لها 3 واجهات:
- الواجهة الأولى: التحقق من جاهزية اللاعب للبدء في اللعبة وذلك بالنقر على TOUCH TO START.
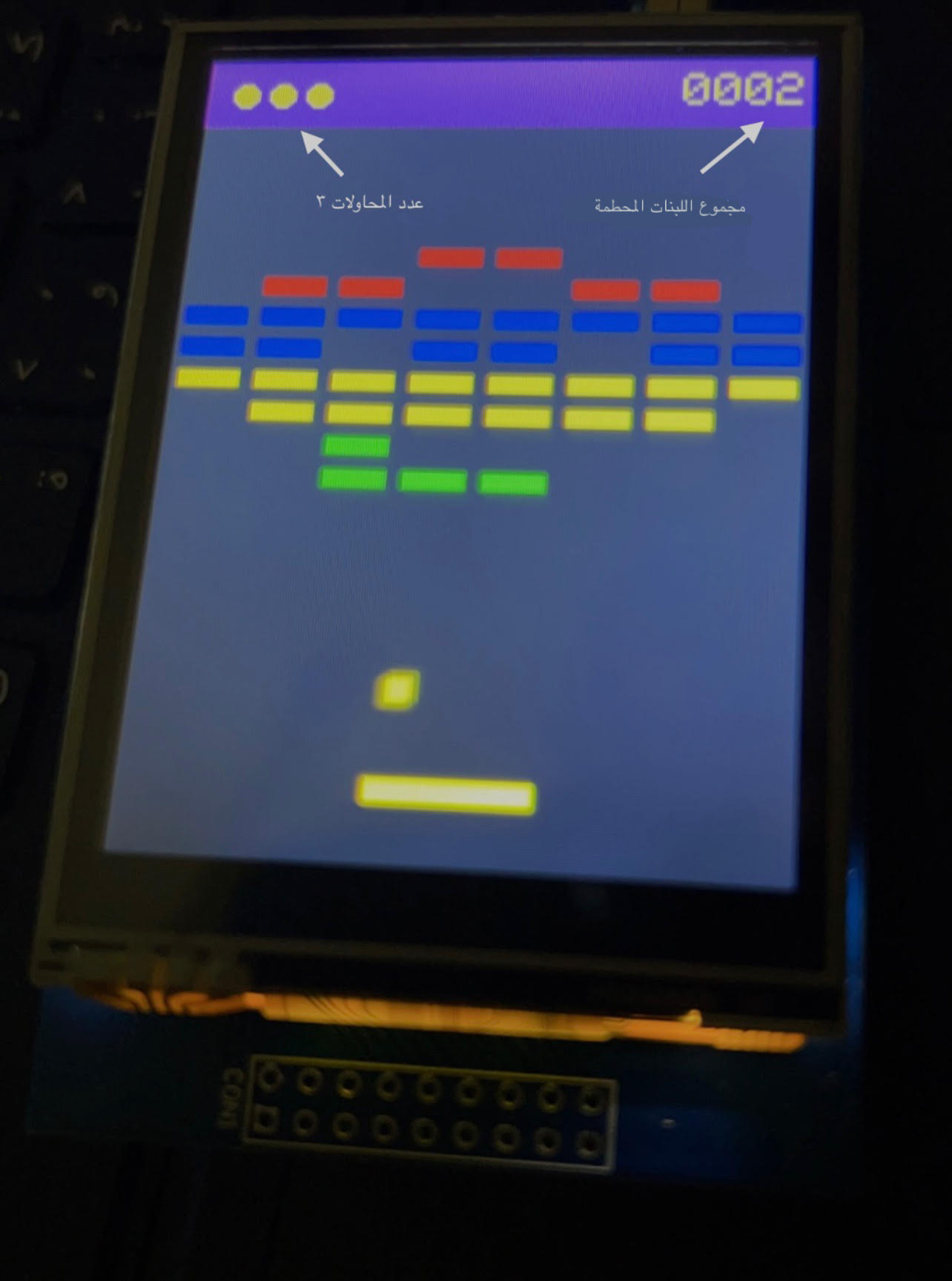
- الواجهة الثانية: واجهة اللعبة الأساسية وفيها يبدأ اللاعب بتحطيم الطوب وستظهر له عدد المحاولات المتبقية وعدد اللبنات المحطمة.
- الواجهة الثالثة: هي واجهة تفيد اللاعب بانتهاء كل المحاولات GAME OVER وعليه البدء من جديد وذلك بالنقر على TOUCH TO START.

لا تنسَ فصل مصدر الطاقة بعد الانتهاء من اللعب.



































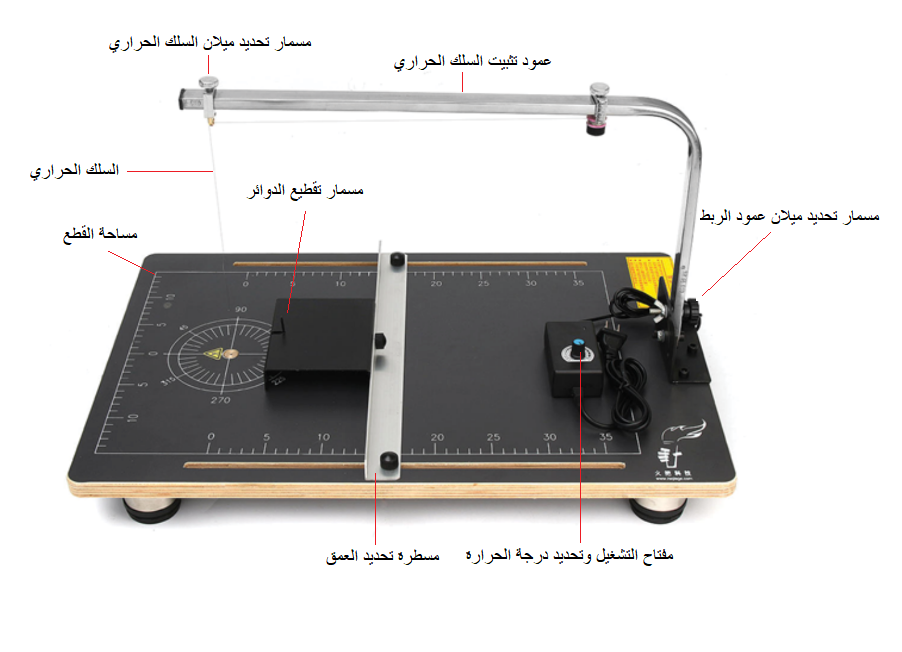
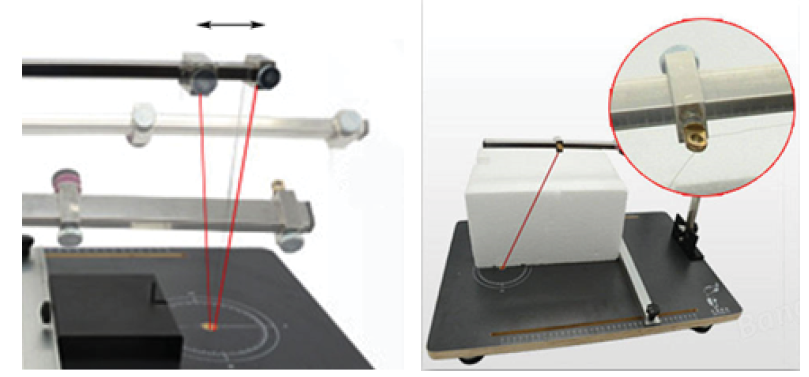
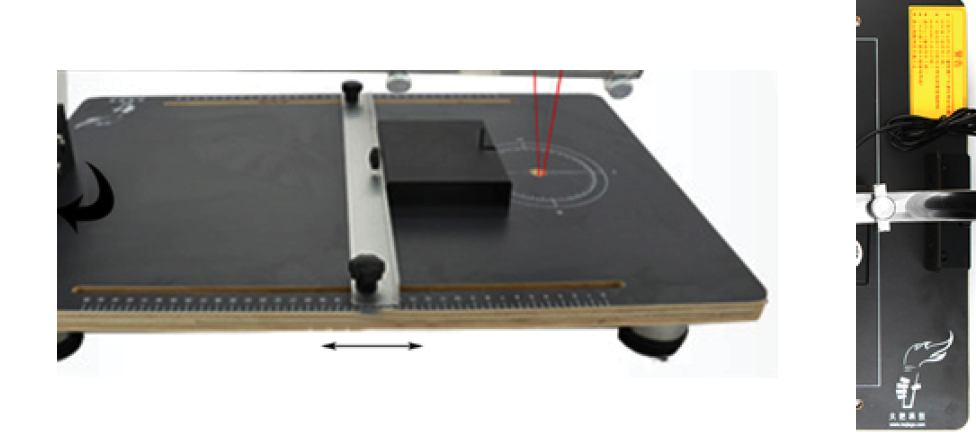
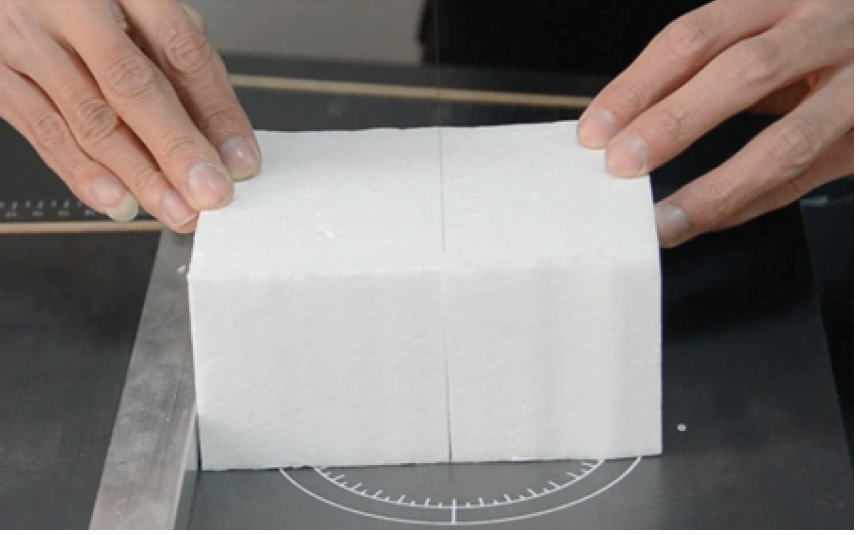
 1× قاطع الفلين بالسلك الحراري
1× قاطع الفلين بالسلك الحراري