المحرك الخطوي من أشهر و أهم أنواع المحركات، وبعد مهم في مجالات مختلفة مثل الروبوتات، في هذا الدرس سوف نتعلم برمجة المحرك الخطوي (Stepper Motor) والتحكم باتجاه دوران المحرك باستخدام الراسبيري باي و الدائرة المتكاملة (L293D) .
المواد و الأدوات

X1 راسبيري باي

X1 محرك خطوي

X1 الدائرة المتكاملة (L293D IC)

X1 محول طاقة

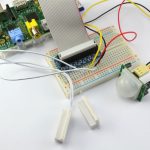
توصيل الدائرة
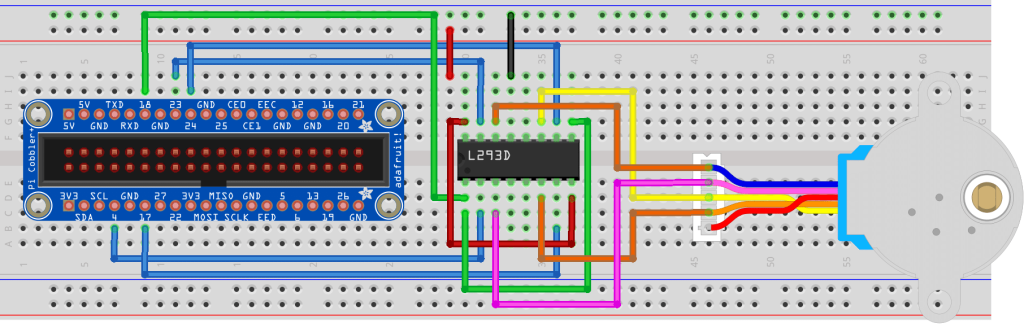
سوف تبدأ توصيل الدائرة بتثبيت لوحة التوصيل الخاصة بالراسبيري باي على لوحة التجارب، ثم يتم توصيل الدائرة كما هو موضح بالصورة ثم تستخدم شريط التوصيل المرن للتوصيل بين الراسبيري باي و لوحة التجارب
المحرك الخطوي
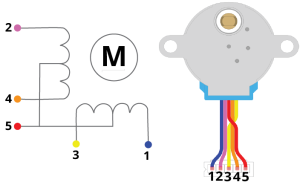
يتكون المحرك الخطوي المستخدم في هذا الدرس (28BYJ-48) من جزء ثابت وهو عبارة عن 4 ملفات تشكل حلقة حول الدوار وهو الجزء المتحرك ، ومبدأ عمله أنه يحول النبضات الكهربائية إلى دوران ميكانيكي، عند تطبيق الإشارات الكهربائية ،و يدور بزيادات دقيقة وثابتة تُعرف بالخطوات.
توضح الصورة كيفية عمل دوران المحرك.
يحتوي هذا المحرك على أربع ملفات. يتم توصيل أحد طرفي جميع الملفات بسلك 5 فولت (أحمر) ويتم سحب الطرف الآخر من كل ملف بألوان السلك البرتقالي والوردي والأصفر والأزرق على التوالي
حساب الخطوات
لتعيين عدد الخطوات في دورة واحدة للمحرك الخطوي ، تحتاج أن تعود إلى ورقة البيانات الخاصة بالمحرك الذي تستخدمه لتعرف قيمة وضع الخطوة الكاملة، و نسبة تروس التخفيض (Variation Ratio).
في محرك (28BYJ-48) حسب ورقة البيانات عند عمل المحرك في وضع الخطوة الكاملة فإنه بمقدار 11.25درجة إذا يحتاج المحرك إلى 32 خطوة ليكمل دورة بمقدار 360 درجة. (11.25*360)
يجب ضرب نسبة التروس 1/64 في عدد الخطوات لكل دورة (32 * 63.68395 خطوة لكل دورة = 2037.8864 تقريبًا 2038 خطوة).
البرمجة
افتح نافذة SSH الخاصة بالراسبيري باي ثم اكتب الأمر التالي لفتح ملف نصي جديد باسم stepper:
$nano stepper.py
انسخ الكود البرمجي التالي ثم قم بالضغط على CTRL+x ثم إضغط Y لحفظ الملف:
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
enable_pin = 18
coil_A_1_pin = 4
coil_A_2_pin = 17
coil_B_1_pin = 23
coil_B_2_pin = 24
GPIO.setup(enable_pin, GPIO.OUT)
GPIO.setup(coil_A_1_pin, GPIO.OUT)
GPIO.setup(coil_A_2_pin, GPIO.OUT)
GPIO.setup(coil_B_1_pin, GPIO.OUT)
GPIO.setup(coil_B_2_pin, GPIO.OUT)
GPIO.output(enable_pin, 1)
def setStep(w1, w2, w3, w4):
GPIO.output(coil_A_1_pin, w1)
GPIO.output(coil_A_2_pin, w2)
GPIO.output(coil_B_1_pin, w3)
GPIO.output(coil_B_2_pin, w4)
try:
while True:
#forward
for i in range(512):
setStep(1, 0, 1, 0)
time.sleep(0.05)
setStep(0, 1, 1, 0)
time.sleep(0.05)
setStep(0, 1, 0, 1)
time.sleep(0.05)
setStep(1, 0, 0, 1)
time.sleep(0.05)
time.sleep(1)
#backwards
for i in range(512):
setStep(1, 0, 0, 1)
time.sleep(0.05)
setStep(0, 1, 0, 1)
time.sleep(0.05)
setStep(0, 1, 1, 0)
time.sleep(0.05)
setStep(1, 0, 1, 0)
time.sleep(0.05)
time.sleep(1)
except KeyboardInterrupt:
GPIO.cleanup()
أخيرًا لتشغيل البرنامج قم بكتابة الأمر التالي:
sudo python stepper.py
شرح البرمجة
في البداية نقوم باستدعاء المكتبات المطلوبة و هي مكتبة (GPIO) و مكتبة الوقت
import RPi.GPIO as GPIO import time GPIO.setmode(GPIO.BCM)
نعرف المنافذ التي تم توصيل المحرك معها
enable_pin = 18 coil_A_1_pin = 4 coil_A_2_pin = 17 coil_B_1_pin = 23 coil_B_2_pin = 24 GPIO.setup(enable_pin, GPIO.OUT) GPIO.setup(coil_A_1_pin, GPIO.OUT) GPIO.setup(coil_A_2_pin, GPIO.OUT) GPIO.setup(coil_B_1_pin, GPIO.OUT) GPIO.setup(coil_B_2_pin, GPIO.OUT) GPIO.output(enable_pin, 1)
نعرف دالة لتشغيل المنافذ
def setStep(w1, w2, w3, w4):
GPIO.output(coil_A_1_pin, w1)
GPIO.output(coil_A_2_pin, w2)
GPIO.output(coil_B_1_pin, w3)
GPIO.output(coil_B_2_pin, w4)
نعطي أمر ليتحرك في إتجاهان مع عقارب الساعة و عكس عقارب الساعة