الشفرة البرمجية
#include <Servo.h>
#define S0 2
#define S1 3
#define S2 4
#define S3 5
#define sensorOut 6
Servo topServo;
Servo bottomServo;
int frequency = 0;
int color=0;
void setup() {
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
pinMode(sensorOut, INPUT);
digitalWrite(S0, HIGH);
digitalWrite(S1, LOW);
topServo.attach(9);
bottomServo.attach(10);
Serial.begin(9600);
}
void loop() {
topServo.write(115);
delay(500);
for(int i = 115; i > 35; i--) {
topServo.write(i);
delay(4);
}
delay(1000);
color = readColor();
delay(10);
switch (color) {
case 1:
bottomServo.write(50);
break;
case 2:
bottomServo.write(90);
break;
case 3:
bottomServo.write(120);
break;
}
delay(300);
for(int i = 35; i > 4; i--) {
topServo.write(i);
delay(2);
}
delay(200);
for(int i = 4; i < 115; i++) {
topServo.write(i);
delay(2);
}
color=0;
}
int readColor() {
// Setting red filtered photodiodes to be read
digitalWrite(S2, LOW);
digitalWrite(S3, LOW);
// Reading the output frequency
frequency = pulseIn(sensorOut, LOW);
int R = frequency;
// Printing the value on the serial monitor
Serial.print("R= ");//printing name
Serial.print(frequency);//printing RED color frequency
Serial.print(" ");
delay(50);
// Setting Green filtered photodiodes to be read
digitalWrite(S2, HIGH);
digitalWrite(S3, HIGH);
// Reading the output frequency
frequency = pulseIn(sensorOut, LOW);
int G = frequency;
// Printing the value on the serial monitor
Serial.print("G= ");//printing name
Serial.print(frequency);//printing RED color frequency
Serial.print(" ");
delay(50);
// Setting Blue filtered photodiodes to be read
digitalWrite(S2, LOW);
digitalWrite(S3, HIGH);
// Reading the output frequency
frequency = pulseIn(sensorOut, LOW);
int B = frequency;
// Printing the value on the serial monitor
Serial.print("B= ");//printing name
Serial.print(frequency);//printing RED color frequency
Serial.println(" ");
delay(50);
if(R<50 & R>46 & B<92 & B>80){
color = 1; // Red
}
if(G<89 & G>80 & B<96 & B>105){
color = 2; // Yellow
}
if(G<89 & G>80 & B<97 &B>93){
color = 3; // Orange
}
return color;
}
شرح الشفرة البرمجية
في بداية سيتم استعداء مكتبة محرك السيرفو ثم نقوم بتعريف منافذ حساس الألوان وتعريف محرك السيرفو
#include <Servo.h> #define S0 2 #define S1 3 #define S2 4 #define S3 5 #define sensorOut 6 Servo topServo; Servo bottomServo;
انشاء متغيرين للتردد و اللون و تكون بالبداية قيمة 0
int frequency = 0; int color=0;
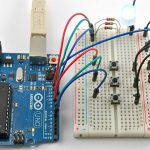
نحدد منافذ الدخل و الخرج في حساس الألوان
void setup() {
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
pinMode(sensorOut, INPUT);
لتحديد عامل تحجيم التردد 20%
digitalWrite(S0, HIGH); digitalWrite(S1, LOW);
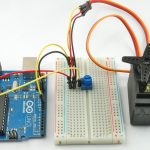
نحدد المنفذ المتصل مع كل محرك سيرفو
topServo.attach(9); bottomServo.attach(10);
لتحديد معدل نقل البيانات من الاردوينو إلى اللابتوب
Serial.begin(9600); }
سوف نحتاج إلى تحريك المحرك الأول في ثلاث زاوية الزاوية الأولى حتى يأخذ قطعة حلوى واحدة ثم ينقلها للزاوية الصانية و تكون الزاوية الموافقة لموقع الحساس و يتم قراءة تردد اللون ثم الزاوية الثالثة لنقل قطعة الحلوى إلى المحرك التالي
أولا الزاوية الأولى نحددها بقية 115
void loop() {
topServo.write(115);
delay(500);
نعرف متغير (i) والذي يمثل قيمة الزاوية تتناقص قيمة (i) إلى أن تصل إلى 35 و التي تعد زاوية قراءة التردد
for(int i = 115; i > 35; i--) {
topServo.write(i);
delay(4);
}
delay(1000);
نحدد 3 زواية مختلفة لمحرك السيرفو الثاني حسب موقع الكوب الذي سنفصل فيه قطع الحلوى حسب لونها
color = readColor();
delay(10);
switch (color) {
case 1:
bottomServo.write(50);
break;
case 2:
bottomServo.write(90);
break;
case 3:
bottomServo.write(120);
break;
}
delay(300);
نغير قيمة الزاوية (i) الى 4 والتي تمثل موقع نقل قطعة الحلوى إلى المحرك الثاني
for(int i = 35; i > 4; i--) {
topServo.write(i);
delay(2);
}
delay(200);
نعيد قيمة (i) إلى 115 و هي أول زاوية و يتم عندها أخذ قطعة حلوى جديدة
for(int i = 4; i < 115; i++) {
topServo.write(i);
delay(2);
}
color=0;
}
انشاء متغير باسم (readColor) لقراءة الألوان
int readColor() {
لقراءة اللون الأحمر نفعل الصمام الثنائي الضوئي المرشح باللون الأحمر عن طريق جعل قيمة s2 و s3 loW
digitalWrite(S2, LOW); digitalWrite(S3, LOW);
لقراءة قيمة التردد و طباعته على شاشة العرض
frequency = pulseIn(sensorOut, LOW);
int R = frequency;
// Printing the value on the serial monitor
Serial.print("R= ");//printing name
Serial.print(frequency);//printing RED color frequency
Serial.print(" ");
delay(50);
لقراءة اللون الأخضر نفعل الصمام الثنائي الضوئي المرشح باللون الأخضر عن طريق جعل قيمة s2 و s3 HIGH
digitalWrite(S2, HIGH); digitalWrite(S3, HIGH);
لقراءة قيمة التردد و طباعته على شاشة العرض
frequency = pulseIn(sensorOut, LOW);
int G = frequency;
// Printing the value on the serial monitor
Serial.print("G= ");//printing name
Serial.print(frequency);//printing RED color frequency
Serial.print(" ");
delay(50);
لقراءة اللون الأزرق نفعل الصمام الثنائي الضوئي المرشح باللون الأزرق عن طريق جعل قيمة S2 LOW و S3 HIGH
digitalWrite(S2, LOW); digitalWrite(S3, HIGH);
لقراءة قيمة التردد و طباعته على شاشة العرض
frequency = pulseIn(sensorOut, LOW);
int B = frequency;
// Printing the value on the serial monitor
Serial.print("B= ");//printing name
Serial.print(frequency);//printing RED color frequency
Serial.println(" ");
delay(50);
نحدد نطاق اللون لكل قطعة حلوى حسب التي تم قراءة في شاشة العرض ثم نحدد الزاوية التي يتجة لها محرك السيرفو الثاني
if(R<50 & R>46 & B<92 & B>80){
color = 1; // Red
}
if(G<89 & G>80 & B<96 & B>105){
color = 2; // Yellow
}
if(G<89 & G>80 & B<97 &B>93){
color = 3; // Orange
}
return color;
}