في هذا الدرس سنتعلم صنع نظام حساب سرعة دراجة هوائية باستخدام اردوينو، و مستشعر مفتاح الاتصال المغناطيسي، وسيتم عرض بيانات السرعة على شاشة كرستالية،و النظام يعطي بيانات عن المسافة وزمن الرحلة بالدقائق، وذلك من خلال توفير مفتاح ضغاط ، عند النقر على المفتاح سيتم التبديل بين شاشة تعرض المسافة و السرعة وشاشة تعرض المسافة ومدة الرحلة.

المواد و الأدوات
في هذا الدرس تحتاج إلى الأدوات التالية
| اردوينو اونو | 1X |
| I2C / IIC Serial Interface Module | 1X |
| سلك اردوينو | 1X |
| شاشة كرستالية | 1X |
| لوحة تجارب | 1X |
| مستشعر مفتاح الاتصال المغناطيسي | 1X |
| مقاومة 10 كيلو أوم | 1X |
| ضغاط التحكم | 1X |
| مجموعة أسلاك توصيل | 1X |
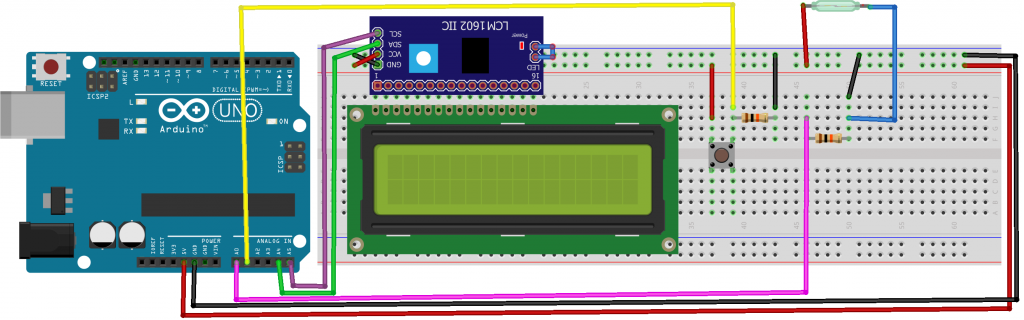
توصيل الدائرة
الكود البرمجي
//librarys
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,20,4);
//definition of variables
long previous, triptime, time, impulses;
float speedometer, dist, aspeed;
int screen=1;
//If you have other circuit of wheel you need change it
float radius=2;
void setup() {
lcd.init(); // initialize the lcd
// Print a message to the LCD.
lcd.setCursor(1,0);
pinMode(A0, INPUT);
pinMode(A1, INPUT);
lcd.print("Bike speedometer");
delay(1000);
lcd.setCursor(5, 1);
lcd.print("V 1.0");
delay(4000);
lcd.clear();
delay(500);
lcd.setCursor(0, 0);
lcd.print("Dist:");
}
void loop() {
int aa=analogRead (A0);
Serial.println (aa);
//if wheel turns
if(analogRead(A0)>=300){
//number of turns++
impulses++;
//count turn time
time=(millis()-previous);
//count speed
speedometer=(3600000 / time) * radius/ 1000;
speedometer=(circuit / time)*3600.0;
previous=millis();
delay(100);
}
Lcd();
}
void Lcd(){
//when button is clicked
if(digitalRead (A1)==1){
lcd.clear();
screen++;
if(screen==3){
screen=1;
}
}
if(screen==1){
//displays speed
lcd.setCursor(0, 1);
lcd.print("Speed:");
lcd.setCursor(7, 1);
lcd.print(speedometer);
lcd.print("km/h");
}
if(screen== 2){
//diplays trip time
triptime=millis()/60000;
lcd.setCursor(0, 1);
lcd.print("Time:");
lcd.setCursor(7, 1);
lcd.print(triptime);
}
lcd.setCursor(0, 0);
lcd.print("Dist:");
//calculation of the distance
dist=impulses*radius/1000.00;
//dislays distance
lcd.setCursor(6,0);
lcd.print(dist);
lcd.print("km");
}
شرح الكود البرمجي
سنقوم في البداية باستدعاء مكتبة (LiquidCrystal_I2C) الخاصة بوحدة i2c و التي تحتوي على مجموعة أوامر برمجية نحتاجها في المشروع
#include <Wire.h> #include <LiquidCrystal_I2C.h>
نعرف عنوان وحدة i2c
LiquidCrystal_I2C lcd(0x27,20,4); //definition of variables
نعرف المتغيرات التالية و هي (previous, triptime, time, impulses, speedometer, dist, aspeed)
long previous, triptime, time, impulses; float speedometer, dist, aspeed;
تعريف متغير (screen) و الذي يشير إلى طباعة البيانات و ستتم طباعتها على 3 شاشات شاشة تحتوي على المسافة والسرعة و شاشة تعرض المسافة و متوسط السرعة وشاشة للوقت و المسافة
int screen=1;
تحديد نصف القطر للعجلة
float radius=2.0;
تهيئة الشاشة والمنافذ
void setup() {
itialize the lcd
lcd.init();
// Print a message to the LCD.
lcd.backlight();
lcd.setCursor(1,0);
pinMode(A0, INPUT);
pinMode(A1, INPUT);
lcd.print("Bike speedometer ");
delay(1000);}
في دالة void loop يتم حساب سرعة دراجة هوائية حسب الوقت المعادلة بالدالة
void loop() {
int aa=analogRead (A0);
//if wheel turns
if(analogRead(A0)>=300){
//number of turns++
impulses++;
//count turn time
time=(millis()-previous);
//count speed
speedometer=(radius/ time)*3600.0;
previous=millis();
delay(100);
}
تحديد البيانات في كل شاشة و سيتم عرض 3 شاشات شاشة تظهر السرعة و شاشة تظهر متوسط السرعة وشاشة تظهر وقت الرحلة بالدقائق
Lcd();
}
void Lcd(){
//when button is clicked
if(digitalRead (A1)==1){
lcd.clear();
screen++;
if(screen==3){
screen=1;
}
}
if(screen==1){
//displays speed
lcd.setCursor(0, 1);
lcd.print("Speed:");
lcd.setCursor(7, 1);
lcd.print(speedometer);
lcd.print("km/h");
}
if(screen== 2){
//diplays trip time
triptime=millis()/60000;
lcd.setCursor(0, 1);
lcd.print("Time:");
lcd.setCursor(7, 1);
lcd.print(triptime);
}
عرض المسافة
lcd.setCursor(0, 0);
lcd.print("Dist:"); //calculation of the distance
dist=impulses*circuit/1000.00; //dislays distance
lcd.setCursor(6,0);
lcd.print(dist);
lcd.print("km"); }
قم بتثبيت المستشعر بحيث يكون في جزء ثابت يقابل العجلة، وعلى العجلة يتم تثبيت المغناطيس في كل مرة تتحرك العجلة و يصبح المغناطيس في مقابل الحساس سيتم حساب نبضة،
تحتاج إلى توفير صندوق باستخدام طابعة ثلاثية الأبعاد أو قاطع الليزر لحفظ كافة القطع بشكل ثابت أثناء الرحلة