مقدمة
تستخدم الشاشة في تطبيقات مختلفة في حياتنا اليومية لعرض البيانات والاحصائيات وعرض الصور والفيديوهات المصورة، ستتعلم في هذا الدرس كيف تبرمج لعبة X/O باستخدام الاردوينو والشاشة الكرستالية مقاس 2.8 انش.

المواد والأدوات
1× اردوينو اونو

1× سلك الاردوينو
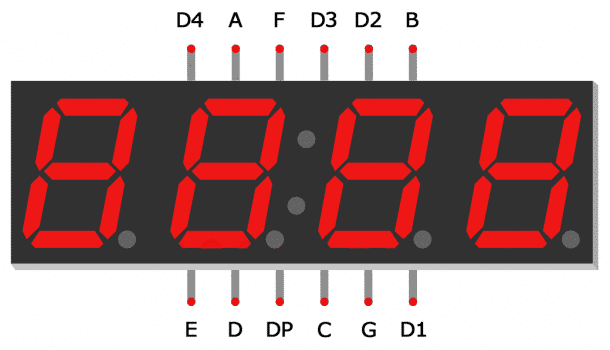
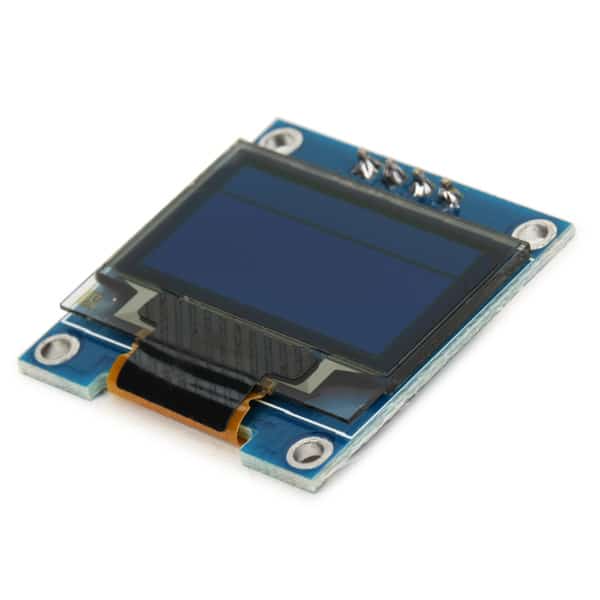
1× شاشة كرستالية “2.8
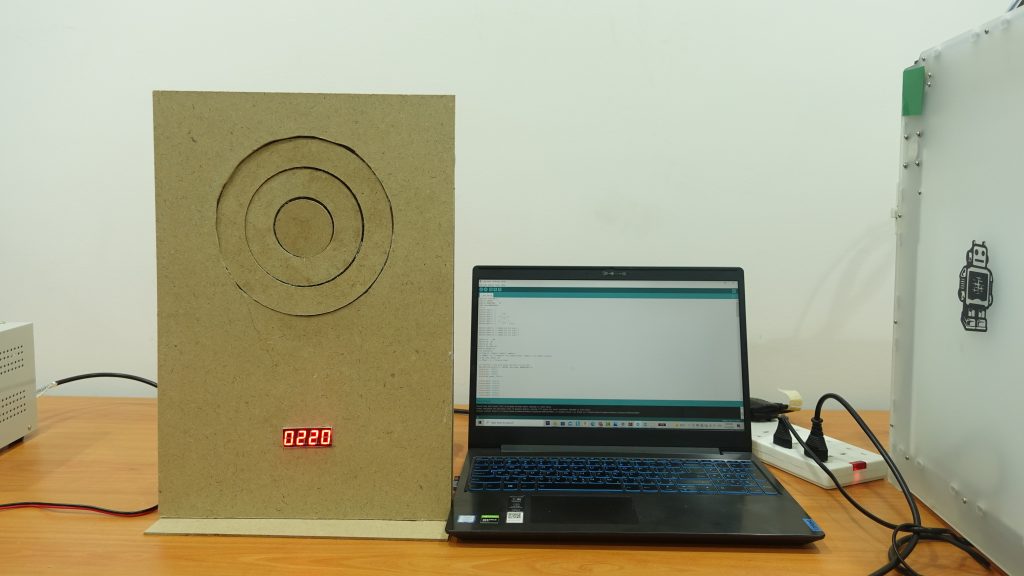
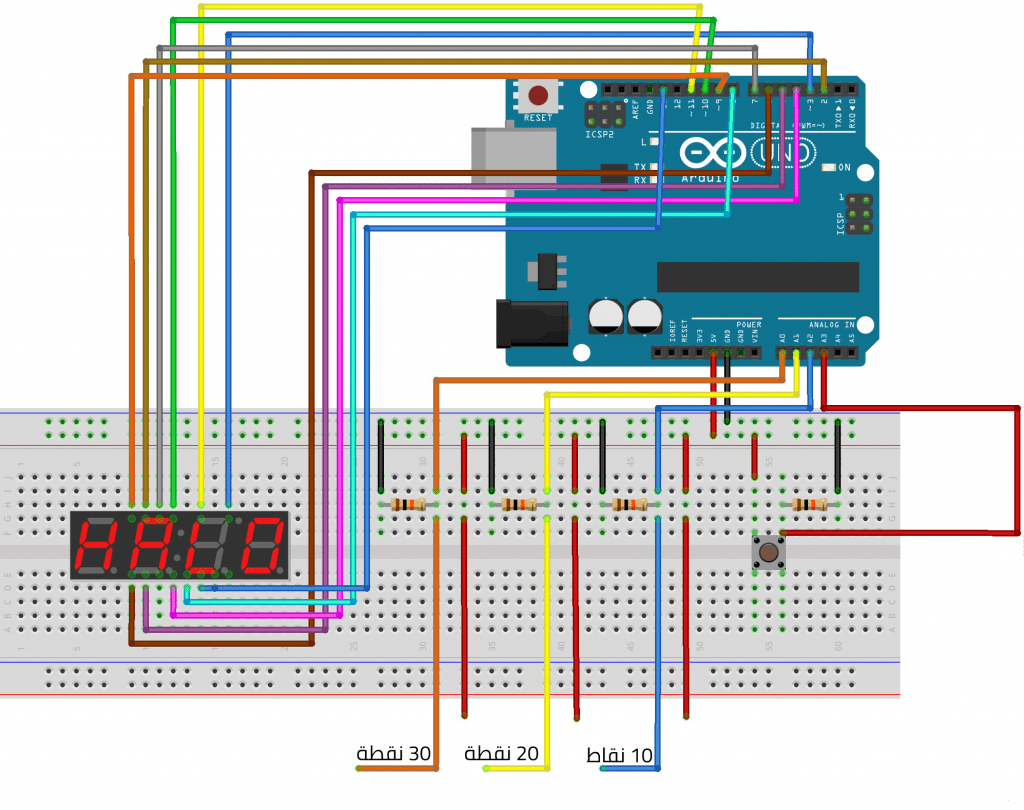
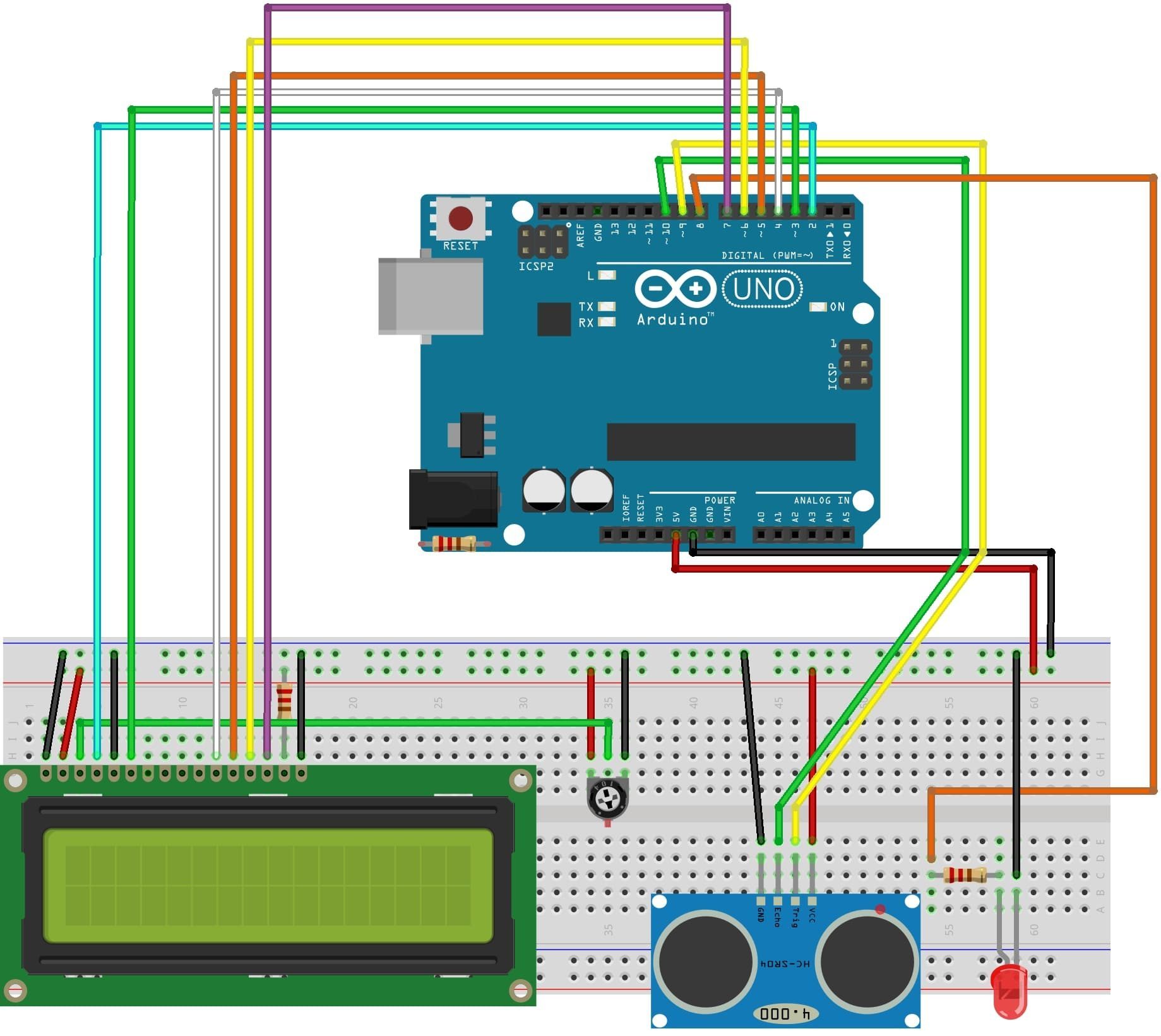
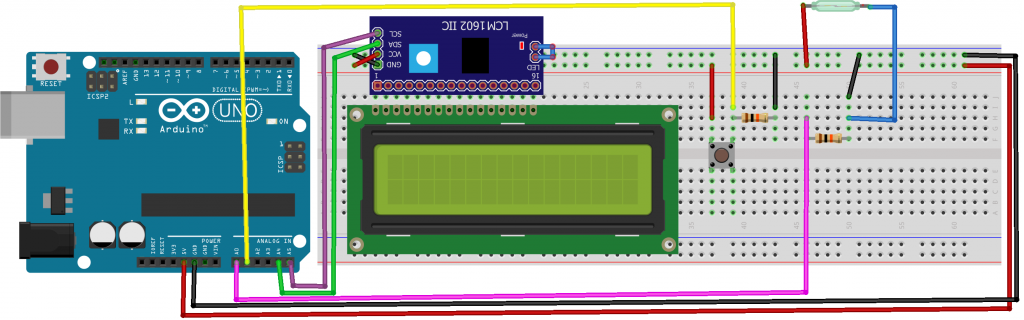
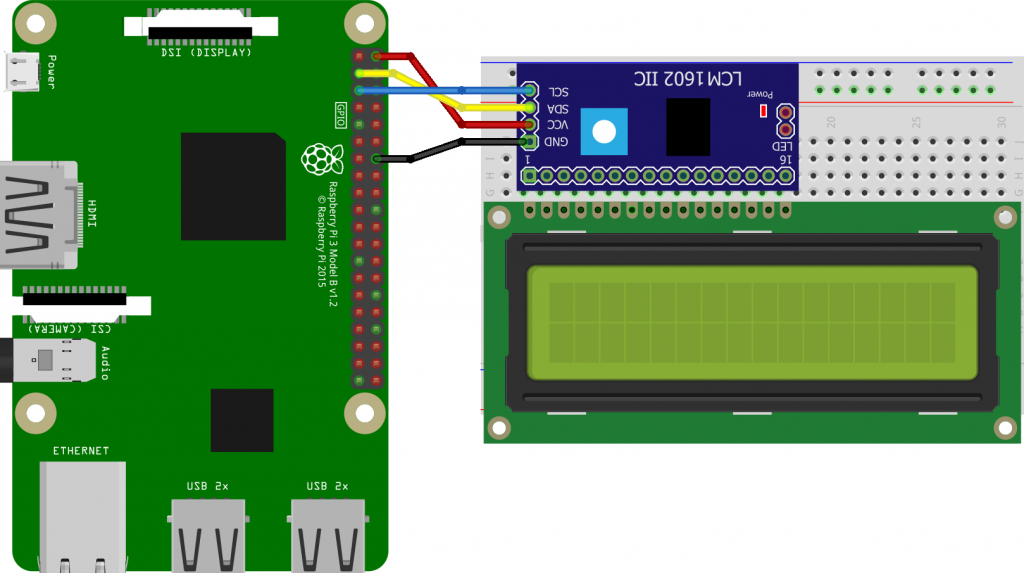
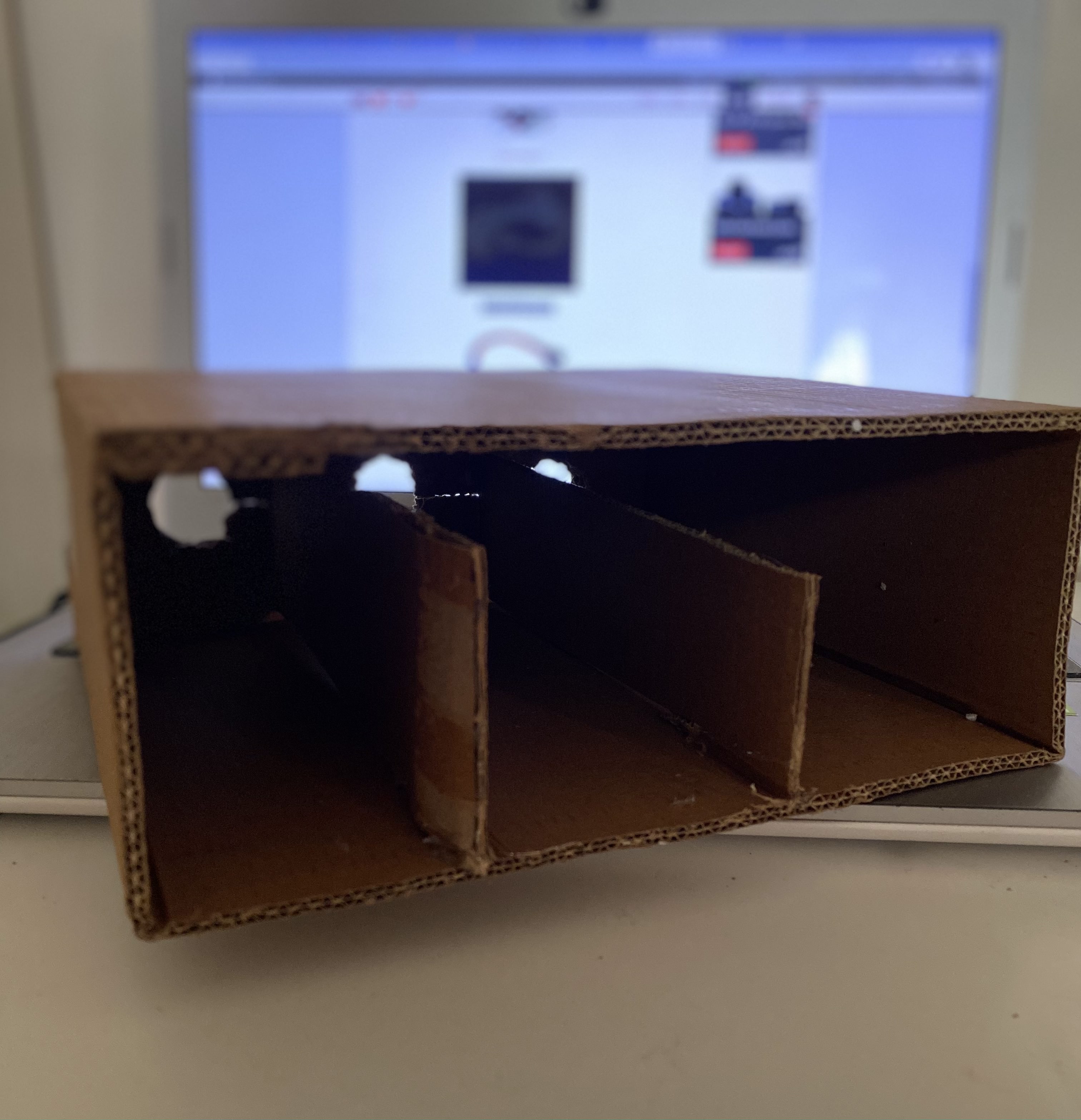
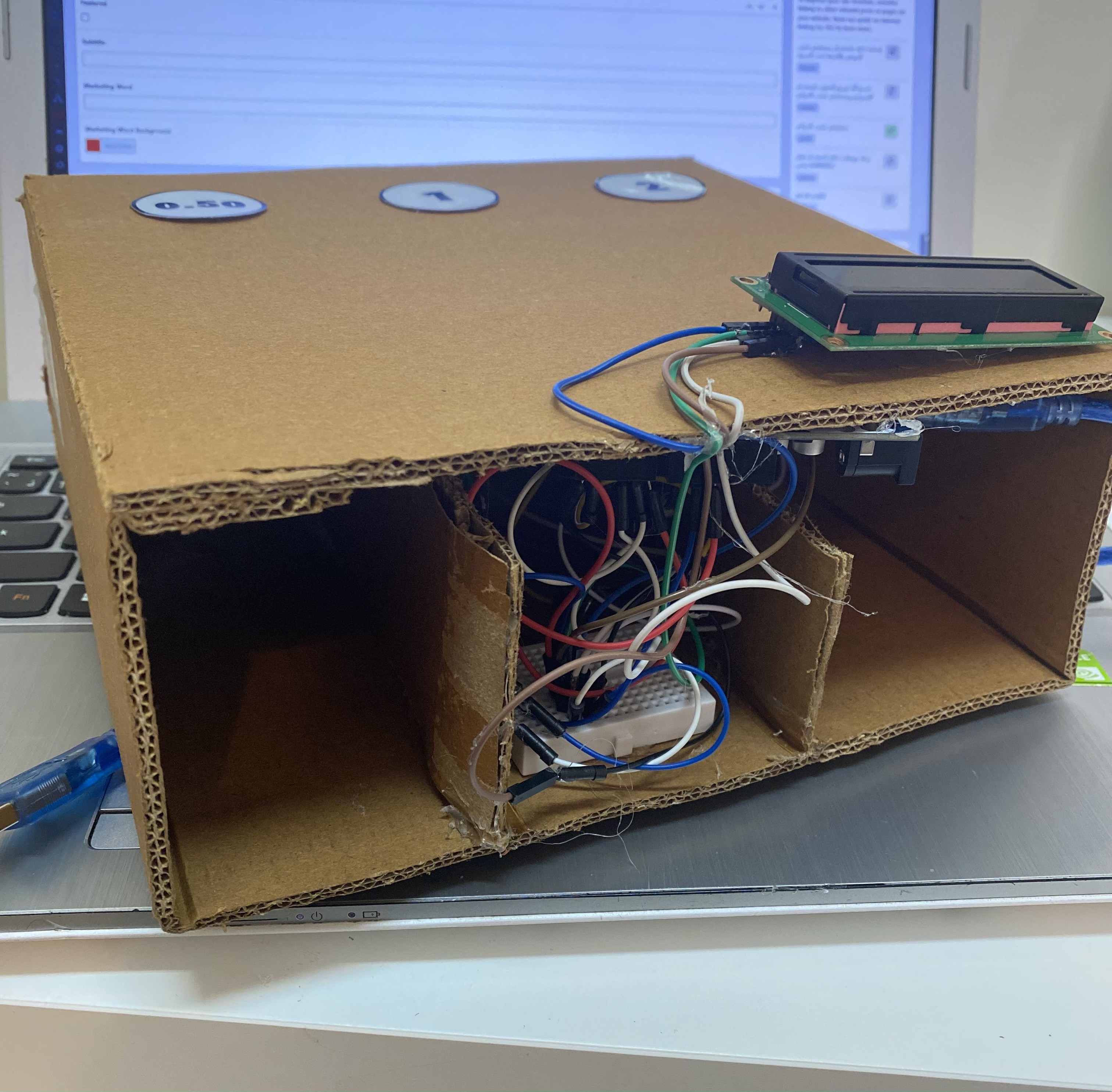
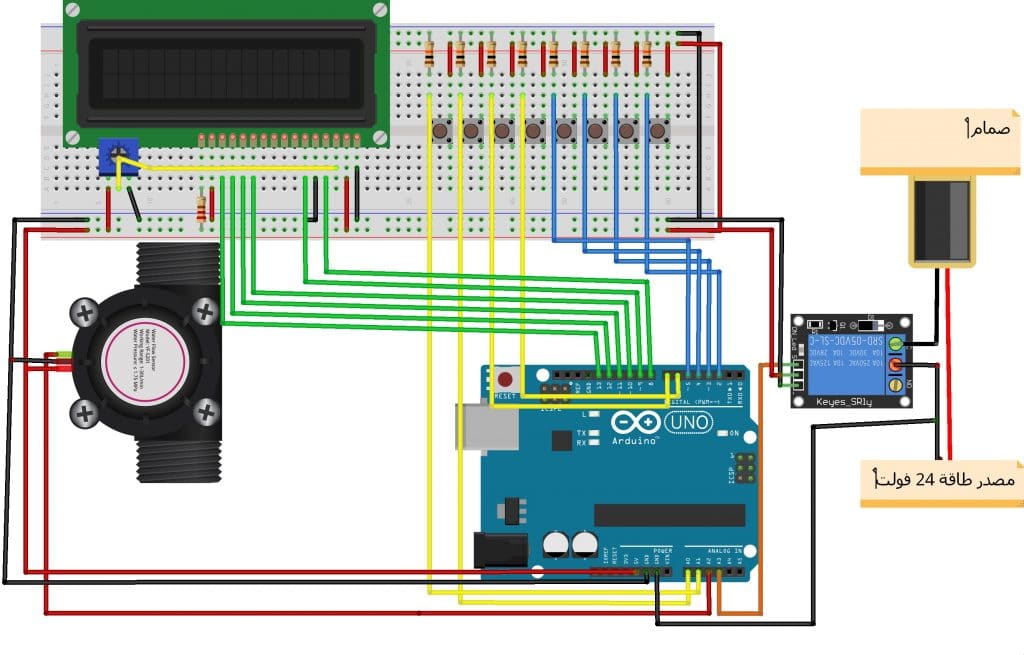
توصيل الدائرة
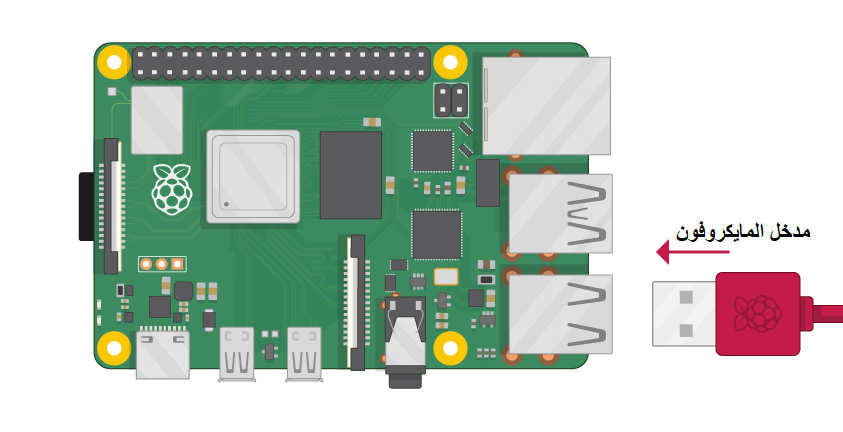
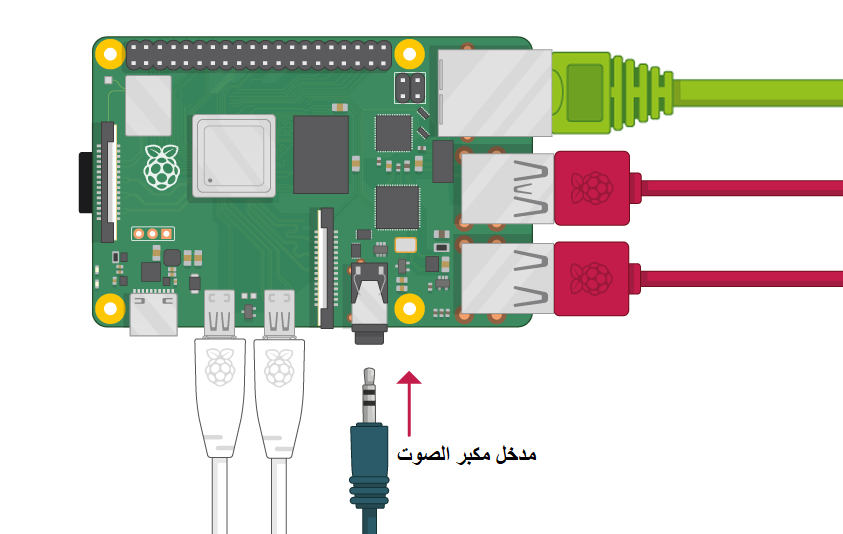
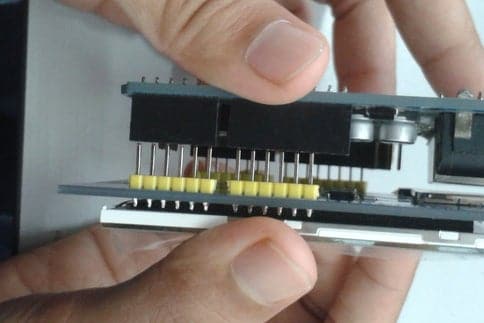
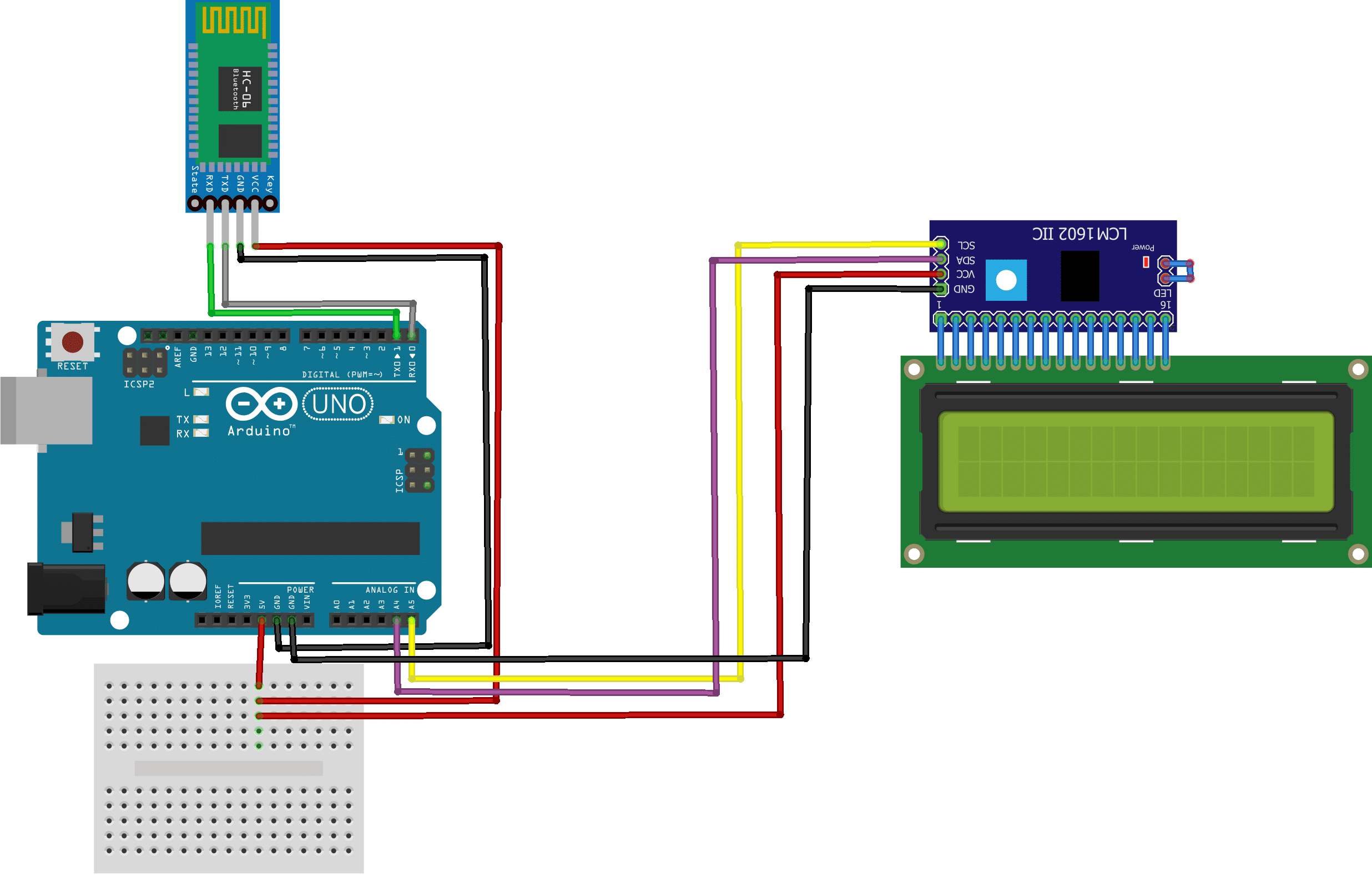
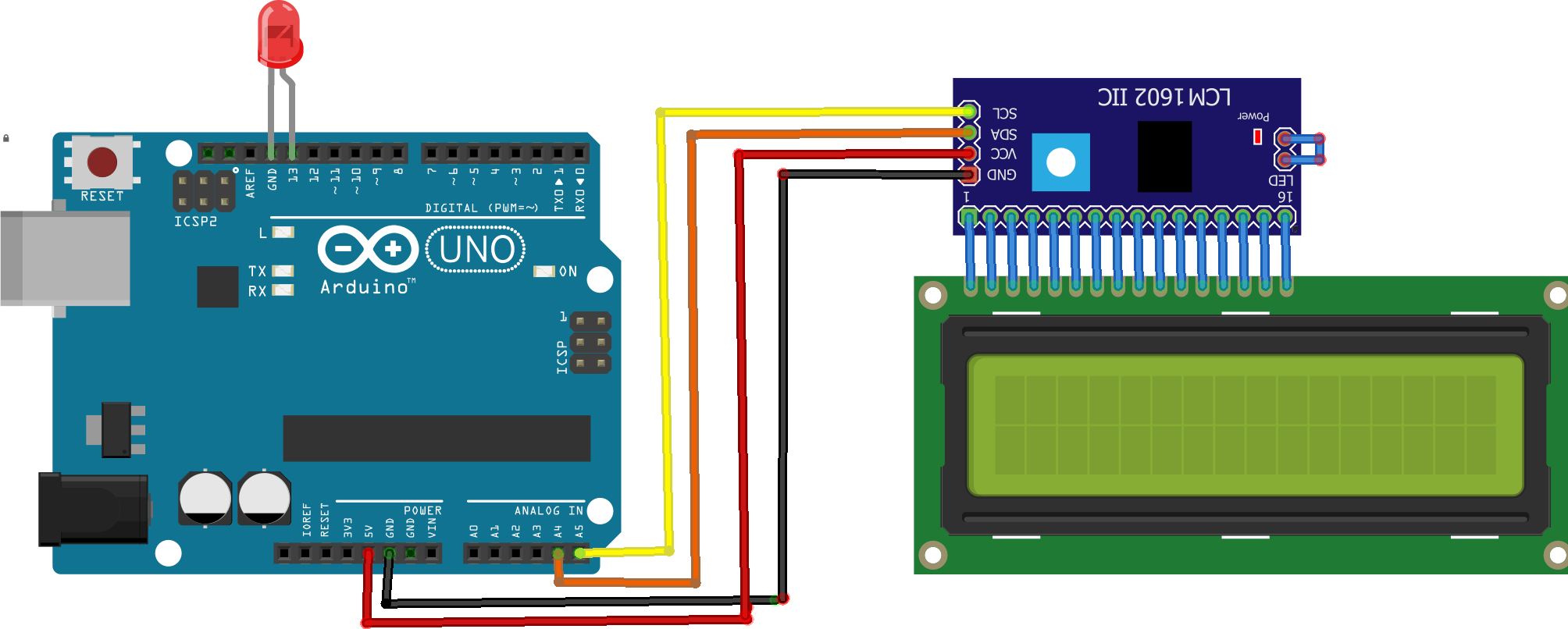
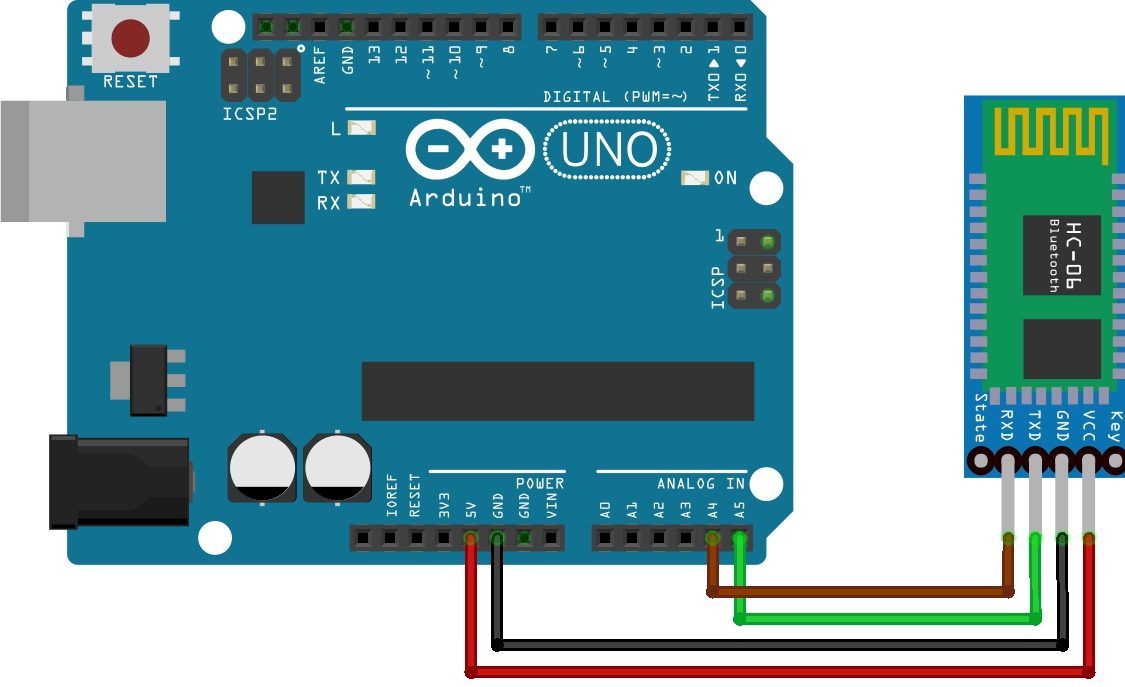
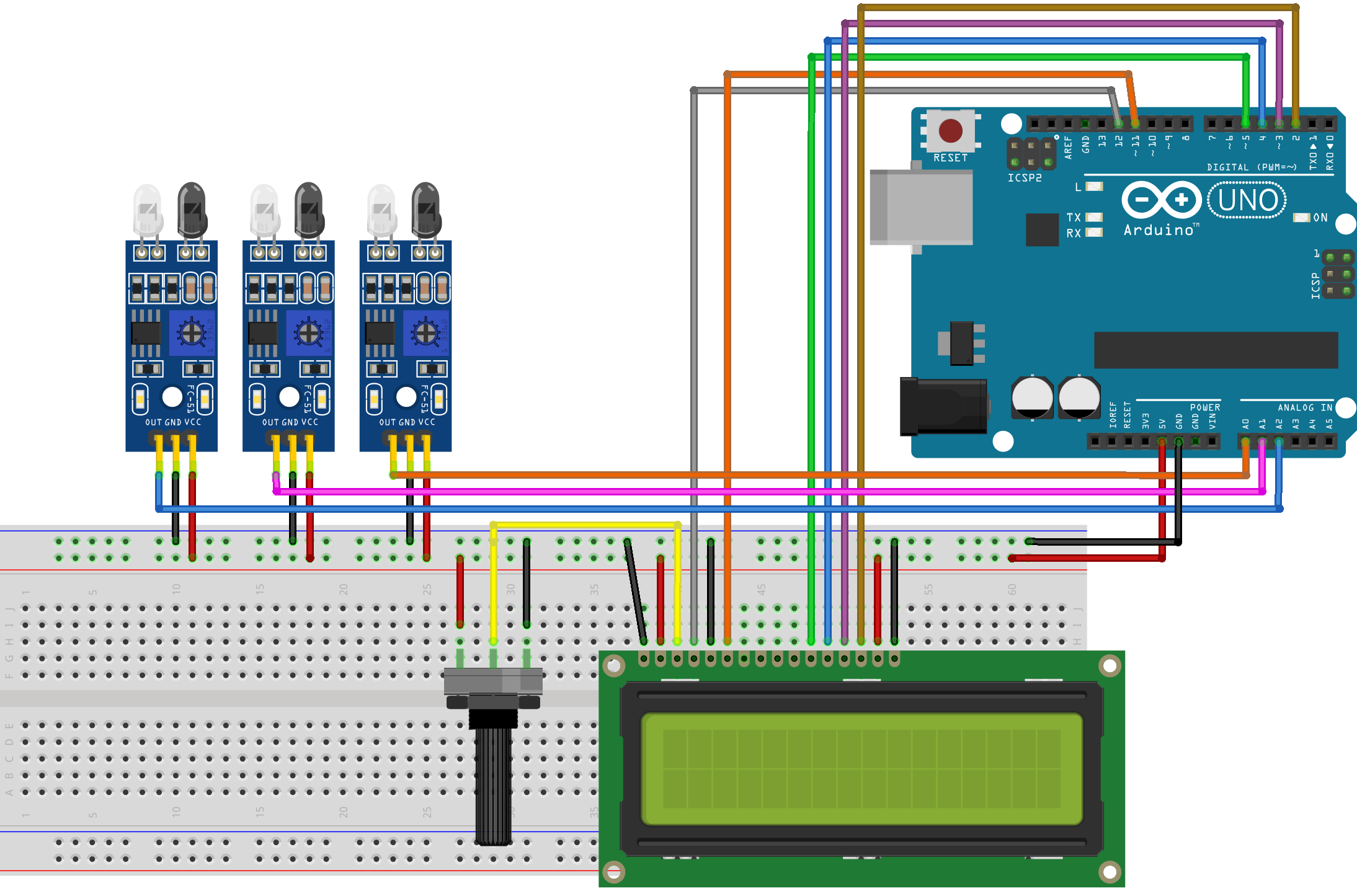
قم بتثبيت الشاشة الكرستالية كما هو ظاهر بالصور عليك الانتباه للمنافذ يجب توصيلها في مكانها الصحيح على لوحة الاردوينو.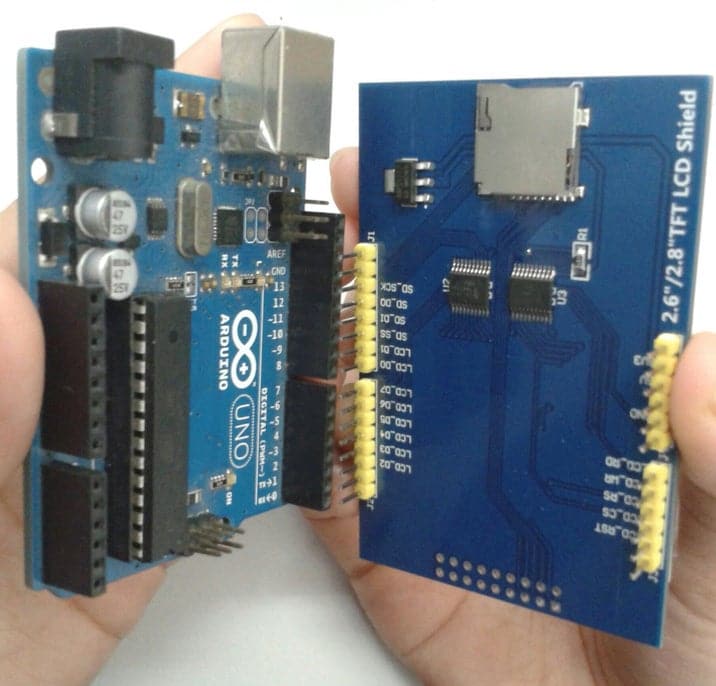
الكود البرمجي
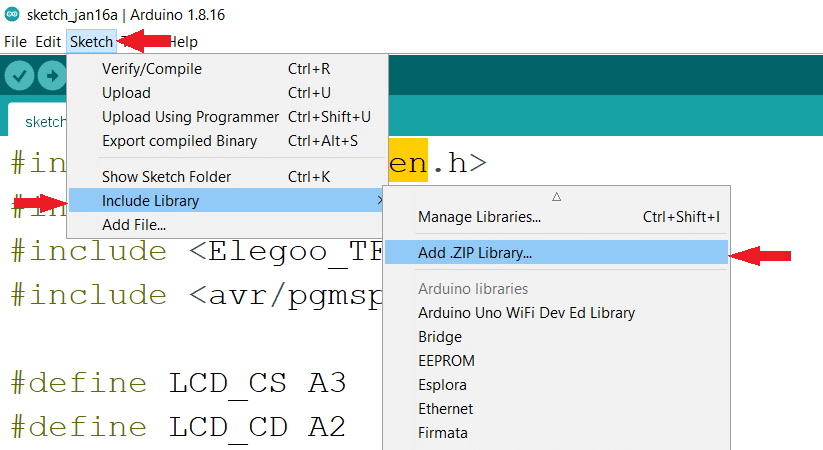
قبل رفع الكود البرمجي للوحة الاردوينو عليك تحميل المكتبات الضرورية للمشروع.
من خلال الرابط التالي:
أولا مكتبة Touchscreen
ثانيا مكتبة Elegoo_GFX
ثالثا مكتبة Elegoo_TFTLCD
#include <TouchScreen.h>
#include <Elegoo_GFX.h>
#include <Elegoo_TFTLCD.h>
#include <avr/pgmspace.h>
#define LCD_CS A3
#define LCD_CD A2
#define LCD_WR A1
#define LCD_RD A0
#define LCD_RESET A4
#define BLACK 0x0000
#define BLUE 0x001F
#define RED 0xF800
#define GREEN 0x07E0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
#define YP A2
#define XM A3
#define YM 8
#define XP 9
TouchScreen ts = TouchScreen(XP, YP, XM, YM, 400);
Elegoo_TFTLCD tft(LCD_CS, LCD_CD, LCD_WR, LCD_RD, LCD_RESET);
const unsigned char x_bitmap[]PROGMEM={
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x3,0xff,0xff,0xc0,0x1,0xff,0xff,0xe0,0x0,
0x1,0xff,0xff,0xe0,0x1,0xff,0xff,0xc0,0x0,
0x1,0xff,0xff,0xf0,0x3,0xff,0xff,0xc0,0x0,
0x0,0xff,0xff,0xf0,0x7,0xff,0xff,0x80,0x0,
0x0,0xff,0xff,0xf8,0x7,0xff,0xff,0x80,0x0,
0x0,0x7f,0xff,0xf8,0xf,0xff,0xff,0x0,0x0,
0x0,0x3f,0xff,0xfc,0xf,0xff,0xfe,0x0,0x0,
0x0,0x3f,0xff,0xfe,0x1f,0xff,0xfe,0x0,0x0,
0x0,0x1f,0xff,0xfe,0x1f,0xff,0xfc,0x0,0x0,
0x0,0x1f,0xff,0xff,0x3f,0xff,0xfc,0x0,0x0,
0x0,0xf,0xff,0xff,0x7f,0xff,0xf8,0x0,0x0,
0x0,0xf,0xff,0xff,0xff,0xff,0xf8,0x0,0x0,
0x0,0x7,0xff,0xff,0xff,0xff,0xf0,0x0,0x0,
0x0,0x3,0xff,0xff,0xff,0xff,0xe0,0x0,0x0,
0x0,0x3,0xff,0xff,0xff,0xff,0xe0,0x0,0x0,
0x0,0x1,0xff,0xff,0xff,0xff,0xc0,0x0,0x0,
0x0,0x1,0xff,0xff,0xff,0xff,0xc0,0x0,0x0,
0x0,0x0,0xff,0xff,0xff,0xff,0x80,0x0,0x0,
0x0,0x0,0xff,0xff,0xff,0xff,0x80,0x0,0x0,
0x0,0x0,0x7f,0xff,0xff,0xff,0x0,0x0,0x0,
0x0,0x0,0x3f,0xff,0xff,0xfe,0x0,0x0,0x0,
0x0,0x0,0x3f,0xff,0xff,0xfe,0x0,0x0,0x0,
0x0,0x0,0x1f,0xff,0xff,0xfc,0x0,0x0,0x0,
0x0,0x0,0x1f,0xff,0xff,0xfc,0x0,0x0,0x0,
0x0,0x0,0x1f,0xff,0xff,0xfc,0x0,0x0,0x0,
0x0,0x0,0x3f,0xff,0xff,0xfe,0x0,0x0,0x0,
0x0,0x0,0x3f,0xff,0xff,0xfe,0x0,0x0,0x0,
0x0,0x0,0x7f,0xff,0xff,0xff,0x0,0x0,0x0,
0x0,0x0,0xff,0xff,0xff,0xff,0x80,0x0,0x0,
0x0,0x0,0xff,0xff,0xff,0xff,0x80,0x0,0x0,
0x0,0x1,0xff,0xff,0xff,0xff,0xc0,0x0,0x0,
0x0,0x1,0xff,0xff,0xff,0xff,0xc0,0x0,0x0,
0x0,0x3,0xff,0xff,0xff,0xff,0xe0,0x0,0x0,
0x0,0x3,0xff,0xff,0xff,0xff,0xe0,0x0,0x0,
0x0,0x7,0xff,0xff,0xff,0xff,0xf0,0x0,0x0,
0x0,0xf,0xff,0xff,0xff,0xff,0xf8,0x0,0x0,
0x0,0xf,0xff,0xff,0xff,0xff,0xf8,0x0,0x0,
0x0,0x1f,0xff,0xff,0x7f,0xff,0xfc,0x0,0x0,
0x0,0x1f,0xff,0xfe,0x3f,0xff,0xfc,0x0,0x0,
0x0,0x3f,0xff,0xfc,0x3f,0xff,0xfe,0x0,0x0,
0x0,0x3f,0xff,0xfc,0x1f,0xff,0xfe,0x0,0x0,
0x0,0x7f,0xff,0xf8,0x1f,0xff,0xff,0x0,0x0,
0x0,0xff,0xff,0xf8,0xf,0xff,0xff,0x80,0x0,
0x0,0xff,0xff,0xf0,0x7,0xff,0xff,0x80,0x0,
0x1,0xff,0xff,0xe0,0x7,0xff,0xff,0xc0,0x0,
0x1,0xff,0xff,0xe0,0x3,0xff,0xff,0xc0,0x0,
0x3,0xff,0xff,0xc0,0x3,0xff,0xff,0xe0,0x0,
0x3,0xff,0xff,0xc0,0x1,0xff,0xff,0xe0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,
0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0,0x0
};
//x = 0 :blue
//x = 1 :red
int x = 0;
int rturn = 0;
int a;
int ab;
int b;
int bb;
int c;
int cb;
int d;
int db;
int e;
int eb;
int f;
int fb;
int g;
int gb;
int h;
int hb;
int i;
int ib;
void setup() {
tft.reset();
tft.begin(0x9341);
tft.fillScreen(BLACK);
tft.setRotation(1);
Serial.begin(9600);
tft.setCursor(60, 110);
tft.setTextColor(RED);
tft.setTextSize(3);
tft.println("X-O Game");
delay(2000);
tft.setCursor(5, 178);
tft.setTextColor(GREEN);
tft.setTextSize(1);
tft.println("In this game, there are two players : Player O");
tft.setCursor(5, 187);
tft.println("and Player X. Each turn, they can put pads on a");
tft.setCursor(5, 196);
tft.println("grid. You win once three of your pads are aligned.");
delay(1000);
tft.fillScreen(BLACK);
tft.drawLine(113, 10, 113, 230, WHITE);
tft.drawLine(208, 10, 208, 230, WHITE);
tft.drawLine(30, 80, 290, 80, WHITE);
tft.drawLine(30, 160, 290, 160, WHITE);
pinMode(13, OUTPUT);
}
void loop()
{
returning:
if(rturn==1){
tft.fillScreen(BLACK);
tft.drawLine(113, 10, 113, 230, WHITE);
tft.drawLine(208, 10, 208, 230, WHITE);
tft.drawLine(30, 80, 290, 80, WHITE);
tft.drawLine(30, 160, 290, 160, WHITE);
rturn = 0;
x = 0;
a = 0;
ab = 0;
b = 0;
bb = 0;
c = 0;
cb = 0;
d = 0;
db = 0;
e = 0;
eb = 0;
f = 0;
fb = 0;
g = 0;
gb = 0;
h = 0;
hb = 0;
i = 0;
ib = 0;
}
digitalWrite(13, HIGH);
TSPoint p = ts.getPoint();
digitalWrite(13, LOW);
if (p.z > ts.pressureThreshhold) {
pinMode(XM, OUTPUT);
pinMode(YP, OUTPUT);
if(p.y < 380){
if(p.x < 400){
if(x==0){
tft.fillCircle(70, 45, 25, YELLOW);
x=x+1;
a = 1;
delay(10);
}
else if(x==1){
drawX(35, 10);
x=x-1;
ab = 1;
delay(10);
}
}
else if(p.x < 650 && p.x > 400){
if(x==0){
tft.fillCircle(160, 45, 25, YELLOW);
x=x+1;
b = 1;
delay(10);
}
else if(x==1){
drawX(130, 10);
x=x-1;
bb = 1;
delay(10);
}}
else if(p.x > 650){
if(x==0){
tft.fillCircle(250, 45, 25, YELLOW);
x=x+1;
c = 1;
delay(10);
}
else if(x==1){
drawX(220, 10);
x=x-1;
cb = 1;
delay(10);
}
}
}
else if(p.y > 380 && p.y < 650){
if(p.x < 400){
if(x==0){
tft.fillCircle(70, 120, 25, YELLOW);
x=x+1;
d = 1;
delay(10);
}
else if(x==1){
drawX(35, 90);
x=x-1;
db = 1;
delay(10);
}
}
else if(p.x < 650 && p.x > 400){
if(x==0){
tft.fillCircle(160, 120, 25, YELLOW);
x=x+1;
e = 1;
delay(10);
}
else if(x==1){
drawX(130, 90);
x=x-1;
eb = 1;
delay(10);
}
}
else if(p.x > 650){
if(x==0){
tft.fillCircle(250, 120, 25, YELLOW);
x=x+1;
f = 1;
delay(10);
}
else if(x==1){
drawX(220, 90);
x=x-1;
fb = 1;
delay(10);
}
}
}
else if(p.y > 650){
if(p.x < 400){
if(x==0){
tft.fillCircle(70, 195, 25, YELLOW);
x=x+1;
g = 1;
delay(10);
}
else if(x==1){
drawX(35, 160);
x=x-1;
gb = 1;
delay(10);
}
}else if(p.x < 650 && p.x > 400){
if(x==0){
tft.fillCircle(160, 195, 25, YELLOW);
x=x+1;
h = 1;
delay(10);
}
else if(x==1){
drawX(130, 160);
x=x-1;
hb = 1;
delay(10);
}
}
else if(p.x > 650){
if(x==0){
tft.fillCircle(250, 195, 25,YELLOW );
x=x+1;
i = 1;
delay(10);
}
else if(x==1){
drawX(220, 160);
x=x-1;
ib = 1;
delay(10);
}
}
}
delay(500);
if(a==1 && b==1 && c==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(d==1 && e==1 && f==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(g==1 && h==1 && i==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}if(a==1 && d==1 && g==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(b==1 && e==1 && h==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(c==1 && f==1 && i==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}if(c==1 && e==1 && g==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(a==1 && e==1 && i==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}if(ab==1 && bb==1 && cb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(db==1 && eb==1 && fb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(gb==1 && hb==1 && ib==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(ab==1 && db==1 && gb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(bb==1 && eb==1 && hb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(cb==1 && fb==1 && ib==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(cb==1 && eb==1 && gb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(ab==1 && eb==1 && ib==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(a||ab==1){
if(b||bb==1){
if(c||cb==1){
if(d||db==1){
if(e||eb==1){
if(f||fb==1){
if(g||gb==1){
if(h||hb==1){
if(i||ib==1){
tft.fillScreen(BLACK);
tft.setCursor(65, 100);
tft.setTextColor(GREEN);
tft.setTextSize(3);
tft.println("No winner.");
delay(2000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
}
}
}
}
}
}
}
}
}
}
void drawBitmap(int16_t x, int16_t y, const uint8_t *bitmap, int16_t w, int16_t h, uint16_t color)
{
int16_t i, j, byteWidth = (w + 7) / 8;
uint8_t byte;
for(j=0; j<h; j++) {
for(i=0; i<w; i++) {
if(i & 7) byte <<= 1;
else byte = pgm_read_byte(bitmap + j * byteWidth + i / 8);
if(byte & 0x80) tft.drawPixel(x+i, y+j, color);
}
}
}
void drawX(int x, int y)
{drawBitmap(x,y,x_bitmap,65,65,RED);
}
يتم تنزيل المكتبات من خلال شريط القوائم في برنامج arduino IDE
أو من خلال فك الضغط عن ملفات المكتبات و نقلها إلى الملف التالي الموجود بجهازك C:\Program Files (x86)\Arduino
شرح الكود البرمجي
هذه الأسطر توضح المكتبات المستخدمة في المشروع والتي تخص مكتبة الشاشة الكرستالية والرسومات المطبوعة عليها.
#include <TouchScreen.h>
#include <Elegoo_GFX.h>
#include <Elegoo_TFTLCD.h>
#include <avr/pgmspace.h>
هنا يتم تعريف المدخلات التناظرية في لوحة الاردوينو والمستخدمة في الشاشة الكرستالية.
#define LCD_CS A3
#define LCD_CD A2
#define LCD_WR A1
#define LCD_RD A0
#define LCD_RESET A4
هنا يتم تعريف الألوان المستخدمة في الشاشة.
#define BLACK 0x0000
#define BLUE 0x001F
#define RED 0xF800
#define GREEN 0x07E0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
في الدالة ()setup يتم تهيئة الشاشة لطباعة النصوص والرموز المستخدمة في لعبة X/O وأيضًا توضيح الألوان المستخدمة لطباعة النصوص والرموز يمكنك تحرير الألوان حسب ما تراه جيد ومناسب لك.
في البداية سينطبع على الشاشة X-O Game ثم بعد ذلك ستبدأ اللعبة.
void setup() {
tft.reset();
tft.begin(0x9341);
tft.fillScreen(BLACK);
tft.setRotation(1);
Serial.begin(9600);
tft.setCursor(60, 110);
tft.setTextColor(RED);
tft.setTextSize(3);
tft.println("X-O Game");
delay(2000);
tft.setCursor(5, 178);
tft.setTextColor(GREEN);
tft.setTextSize(1);
tft.println("In this game, there are two players : Player BLUE");
tft.setCursor(5, 187);
tft.println("and Player RED. Each turn, they can put pads on a");
tft.setCursor(5, 196);
tft.println("grid. You win once three of your pads are aligned.");
delay(9000);
tft.fillScreen(BLACK);
tft.drawLine(113, 10, 113, 230, WHITE);
tft.drawLine(208, 10, 208, 230, WHITE);
tft.drawLine(30, 80, 290, 80, WHITE);
tft.drawLine(30, 160, 290, 160, WHITE);
pinMode(13, OUTPUT);
}
في الدالة ()loop سيتم عرض الشاشة الخاصة باللعبة بالألوان والرموز التي تم تحديدها في الكود البرمجي.
سيتم استخدام الدائرة الصفراء لتمثيل O وسيتم استخدام حرف X الأزرق لتمثيل X.
وسيتم استخدام خطوط بيضاء ممتدة من أعلى الشاشة إلى أسفلها عددها أربعة موزعة أفقيًا وعموديًا للفصل بين الرموز وإعطاء كل لاعب مساحته الخاصة به.
سيتم عرض النتيجة مباشرة بعد اكتمال كل التسع رموز أو في حالة فوز أحد الأطراف قبل اكتمال التسع رموز سيتم إيقاف اللعبة وإعلان الفائز.
#define WHITE 0xFFFF
void loop()
{
returning:
if(rturn==1){
tft.fillScreen(BLACK);
tft.drawLine(113, 10, 113, 230, WHITE);
tft.drawLine(208, 10, 208, 230, WHITE);\tft.drawLine(30, 80, 290, 80, WHITE);
tft.drawLine(30, 160, 290, 160, WHITE);
rturn = 0;
x = 0;
a = 0;
ab = 0;
b = 0;
bb = 0;
c = 0;
cb = 0;
d = 0;
db = 0;
e = 0;
eb = 0;
f = 0;
fb = 0;
g = 0;
gb = 0;
h = 0;
hb = 0;
i = 0;
ib = 0;
}
digitalWrite(13, HIGH);
TSPoint p = ts.getPoint();
digitalWrite(13, LOW);
if (p.z > ts.pressureThreshhold) {
pinMode(XM, OUTPUT);
pinMode(YP, OUTPUT);
if(p.y < 380){
if(p.x < 400){
if(x==0){
tft.fillCircle(70, 45, 25, YELLOW);
x=x+1;
a = 1;
delay(10);
}
else if(x==1){
drawX(35, 10);
x=x-1;
ab = 1;
delay(10);
}
}
else if(p.x < 650 && p.x > 400){
if(x==0){
tft.fillCircle(160, 45, 25, YELLOW);
x=x+1;
b = 1;
delay(10);
}
else if(x==1){
drawX(130, 10);
x=x-1;
bb = 1;
delay(10);
}
}
else if(p.x > 650){
if(x==0){
tft.fillCircle(250, 45, 25, YELLOW);
x=x+1;
c = 1;
delay(10);
}
else if(x==1){
drawX(220, 10);
x=x-1;
cb = 1;
delay(10);
}
}
}
else if(p.y > 380 && p.y < 650){
if(p.x < 400){
if(x==0){
tft.fillCircle(70, 120, 25, YELLOW);
x=x+1;
d = 1;
delay(10);
}
else if(x==1){
drawX(35, 90);
x=x-1;
db = 1;
delay(10);
}
}
else if(p.x < 650 && p.x > 400){
if(x==0){
tft.fillCircle(160, 120, 25, YELLOW);
x=x+1;
e = 1;
delay(10);
}
else if(x==1){
drawX(130, 90);
x=x-1;
eb = 1;
delay(10);
}
}
else if(p.x > 650){
if(x==0){
tft.fillCircle(250, 120, 25, YELLOW);
x=x+1;
f = 1;
delay(10);
}
else if(x==1){
drawX(220, 90);
x=x-1;
fb = 1;
delay(10);
}
}
}
else if(p.y > 650){
if(p.x < 400){
if(x==0){
tft.fillCircle(70, 195, 25, YELLOW);
x=x+1;
g = 1;
delay(10);
}
else if(x==1){
drawX(35, 160);
x=x-1;
gb = 1;
delay(10);
}
}
else if(p.x < 650 && p.x > 400){
if(x==0){
tft.fillCircle(160, 195, 25, YELLOW);
x=x+1;
h = 1;
delay(10);
}
else if(x==1){
drawX(130, 160);
x=x-1;
hb = 1;
delay(10);
}
}
else if(p.x > 650){
if(x==0){
tft.fillCircle(250, 195, 25,YELLOW );
x=x+1;
i = 1;
delay(10);
}
else if(x==1){
drawX(220, 160);
x=x-1;
ib = 1;
delay(10);
}
}
}
delay(500);
if(a==1 && b==1 && c==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(d==1 && e==1 && f==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(g==1 && h==1 && i==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(a==1 && d==1 && g==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(b==1 && e==1 && h==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(c==1 && f==1 && i==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(c==1 && e==1 && g==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(a==1 && e==1 && i==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(GREEN);
tft.setTextSize(2);
tft.println("Player O Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(ab==1 && bb==1 && cb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(db==1 && eb==1 && fb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(gb==1 && hb==1 && ib==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(ab==1 && db==1 && gb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(bb==1 && eb==1 && hb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(cb==1 && fb==1 && ib==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(cb==1 && eb==1 && gb==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(ab==1 && eb==1 && ib==1){
tft.fillScreen(BLACK);
tft.setCursor(80, 110);
tft.setTextColor(YELLOW);
tft.setTextSize(3);
tft.println("Victory !");
tft.setCursor(72, 140);
tft.setTextColor(RED);
tft.setTextSize(2);
tft.println("Player X Win !");
delay(3000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
if(a||ab==1){
if(b||bb==1){
if(c||cb==1){
if(d||db==1){
if(e||eb==1){
if(f||fb==1){
if(g||gb==1){
if(h||hb==1){
if(i||ib==1){
tft.fillScreen(BLACK);
tft.setCursor(65, 100);
tft.setTextColor(GREEN);
tft.setTextSize(3);
tft.println("No winner.");
delay(2000);
tft.fillScreen(BLACK);
tft.setCursor(20, 110);
tft.setTextColor(CYAN);
tft.setTextSize(2);
tft.println("Ready for another game ?");
delay(2000);
tft.setCursor(100, 140);
tft.setTextColor(MAGENTA);
tft.setTextSize(2);
tft.println("Loading");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading.");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading..");
delay(800);
tft.setCursor(100, 140);
tft.println("Loading...");
delay(800);
rturn = 1;
goto returning;
}
}
}
}
}
}
}
}
}
}
}
void drawBitmap(int16_t x, int16_t y, const uint8_t *bitmap, int16_t w, int16_t h, uint16_t color)
{
int16_t i, j, byteWidth = (w + 7) / 8;
uint8_t byte;
for(j=0; j<h; j++) {
for(i=0; i<w; i++) {
if(i & 7) byte <<= 1;
else byte = pgm_read_byte(bitmap + j * byteWidth + i / 8);
if(byte & 0x80) tft.drawPixel(x+i, y+j, color);
}
}
}
void drawX(int x, int y)
{
drawBitmap(x,y,x_bitmap,65,65,RED);
}
يمكنك رفع الكود البرمجي على لوحة الاردوينو باستخدام برنامج اردوينو IDE.
اختبر لعبة X/O.
لا تنسَ فصل مصدر الطاقة بعد الانتهاء من استخدام اللعبة.








:max_bytes(150000):strip_icc():format(webp)/001a-how-to-forward-your-gmail-email-to-another-email-address-1171906-34faee4a26e44bf0867acc095a8227b2.jpg)
:max_bytes(150000):strip_icc():format(webp)/002a-how-to-forward-your-gmail-email-to-another-email-address-1171906-3571b33b927f4a3f91dd47069852ff1c.jpg)
:max_bytes(150000):strip_icc():format(webp)/001-how-to-access-a-gmail-account-with-any-email-client-via-pop-4103715-a988658a0c8948eb819d4d7f79f8be8a.jpg)
:max_bytes(150000):strip_icc():format(webp)/001-gmail-access-thunderbird-1173150-80fdab9339ec4fb9a6c58965db3b8b7b.jpg)
































 عد إلى
عد إلى