سنتعلم في هذا المشروع كيفية إستخدام وحدة RTC “Real Time Clock” وعرض التوقيت على شاشة LCD
المكونات المطلوبة
Arduino Uno
RTC – Real Time Clock
2×16 LCD
Push Buttons
Potentiometer 10K Ω
10k Ohm Resistors
Breadboard
Wires
الشاشة LCD
تعمل الشاشة في أحد الحالات التالية:
1- ان تستقبل امر من الارودوينو و تقوم بتنفيذة مثلا: امر مسح الشاشة و امر التهيئة
lcd.begin(16,2);
lcd.clear();
2- ان تستقبل معلومات من الاردوينو و تقوم بعرضها مثلا : كتابة جملة معينة
lcd.print("Hello");

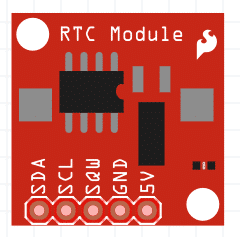
DS3231 RTC Module
هو عبارة عن جهاز بسيط يتم توصيلة مع الاردوينو بهدف حساب التوقيت. بمعنى أنه يمكننا إستخدامه كساعه لمعرفة الوقت.

يستخدم بروتوكول I2C للتواصل مع الاردوينو. وما يميزه أنه يعمل ببطارية خارجية خاصة به مما يتيح له امكانية الحفاظ على حساب التوقيت وحتى عند إنقطاع الكهرباء عن لوحة الاردوينو.
يقوم بحساب التوقيت مثل: الثواني والدقائق والساعات والايام والشهور والسنوات بشكل تلقائي. حيث انه لا يحتاج لإعادة ضبط بسبب إختلاف عدد الايام في بعض الشهور عن الأخرى.
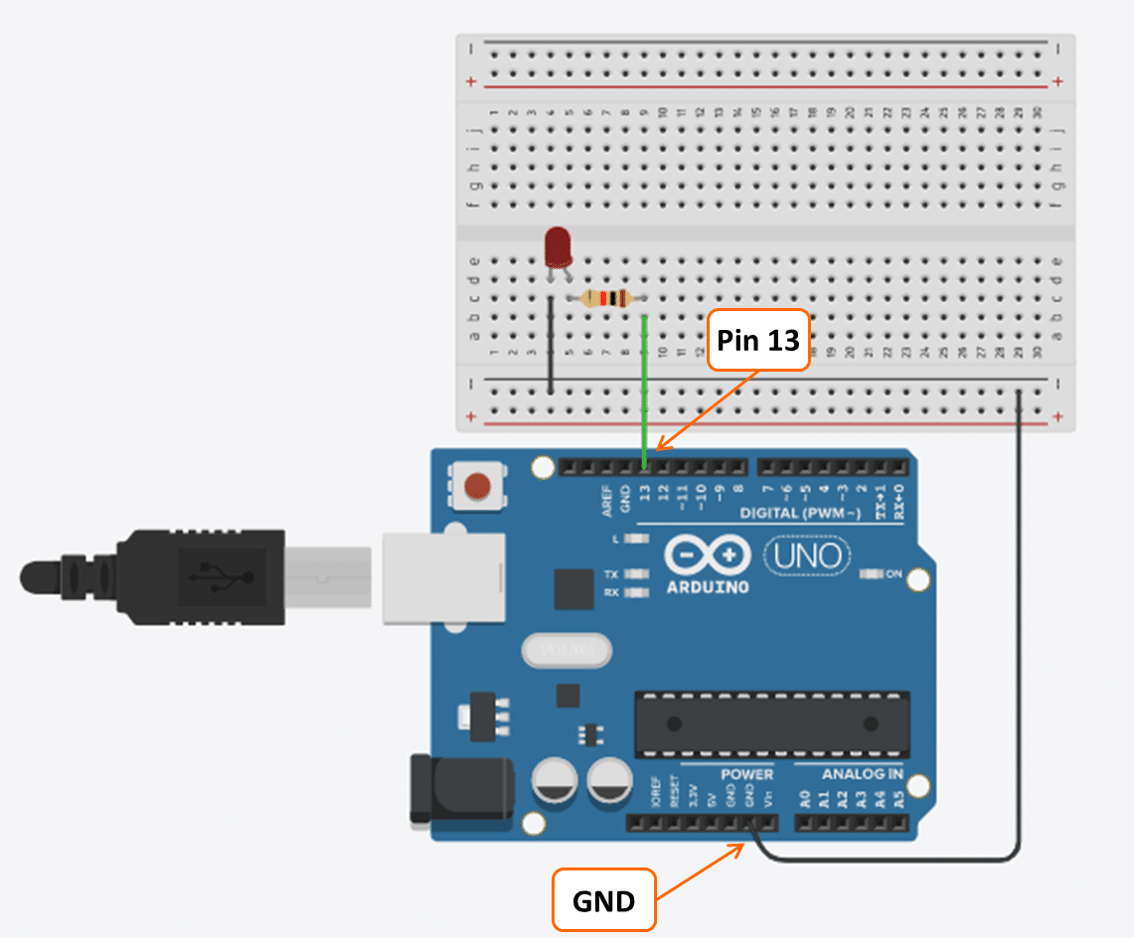
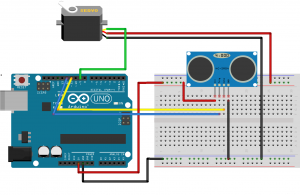
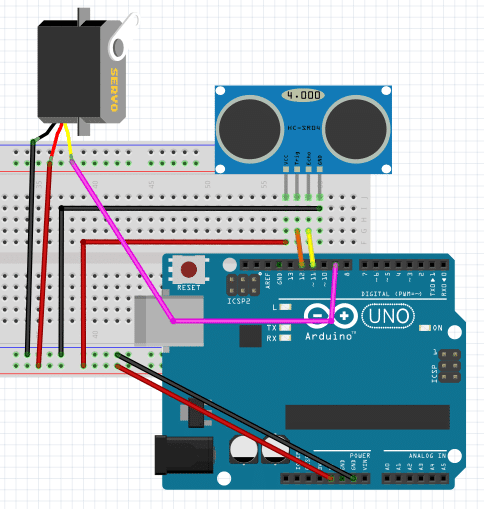
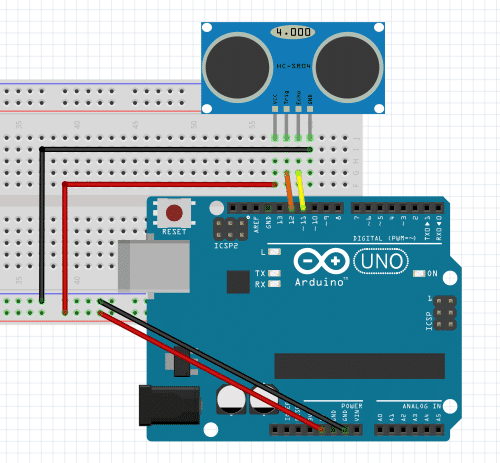
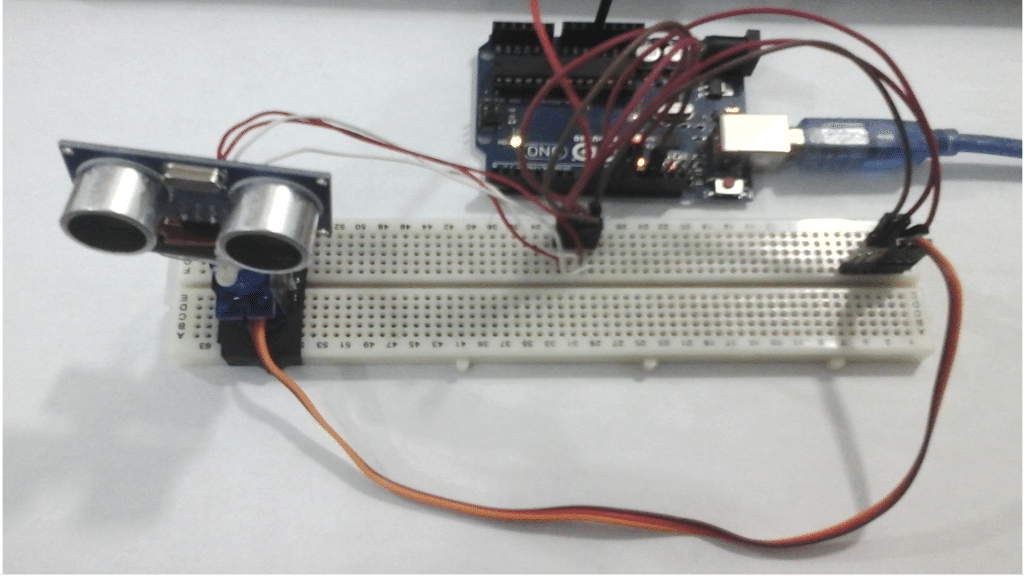
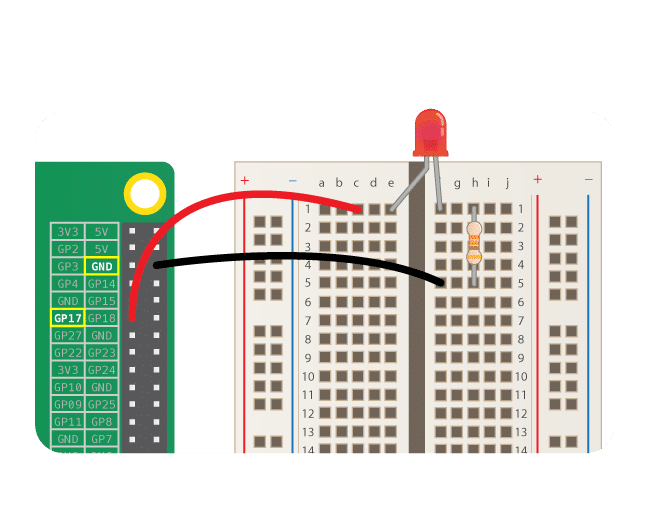
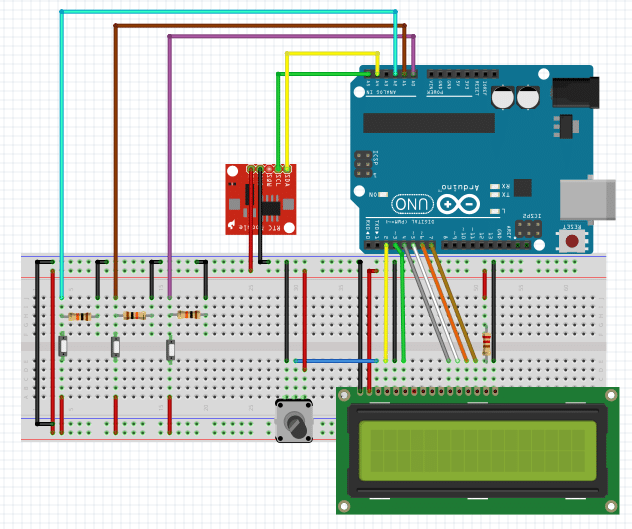
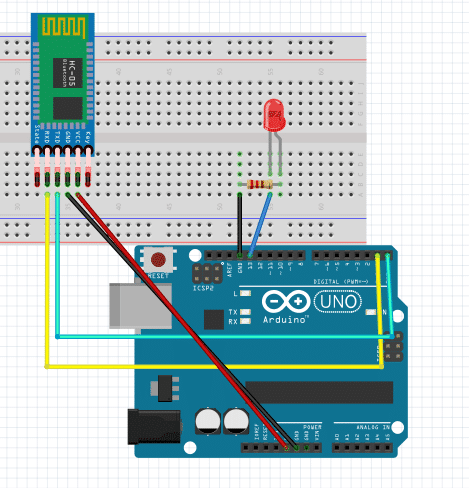
توصيل الدارة
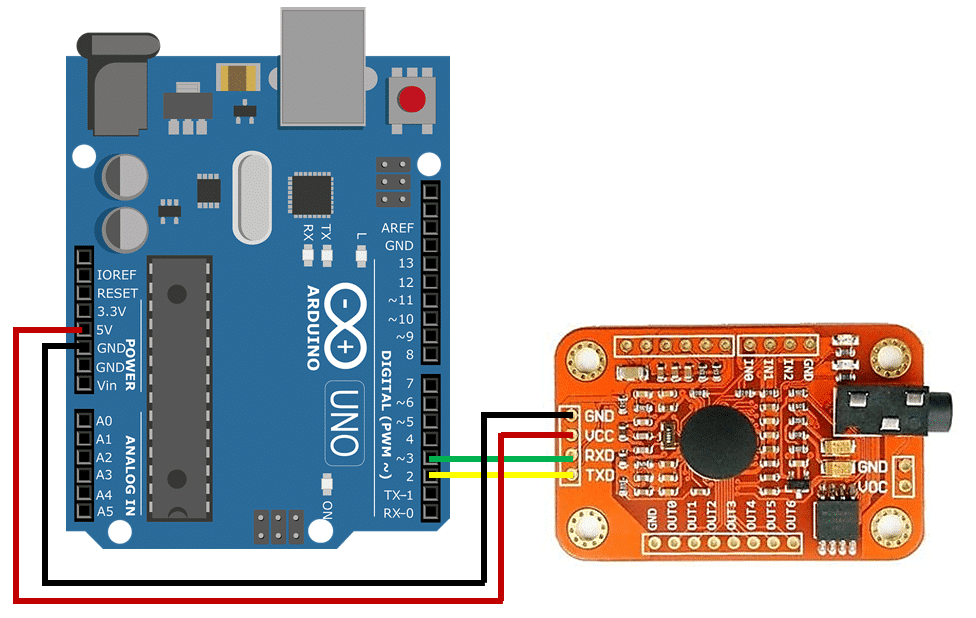
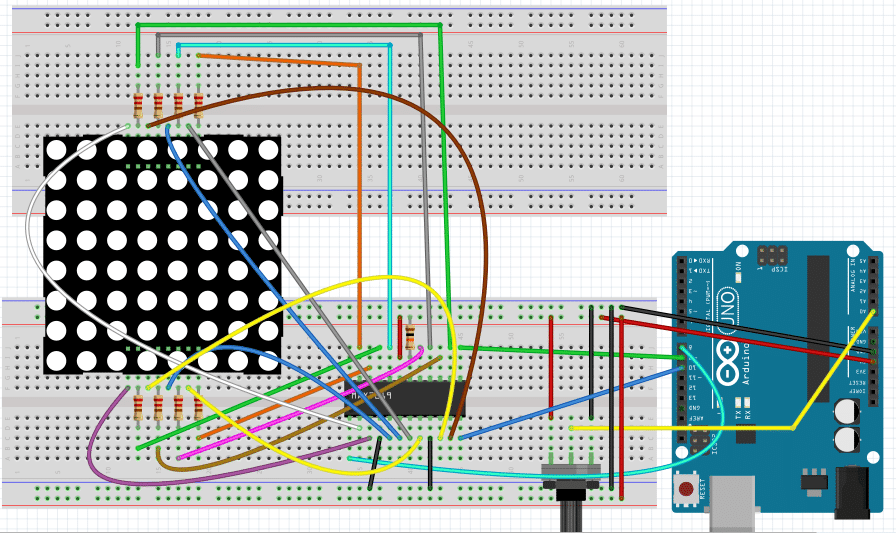
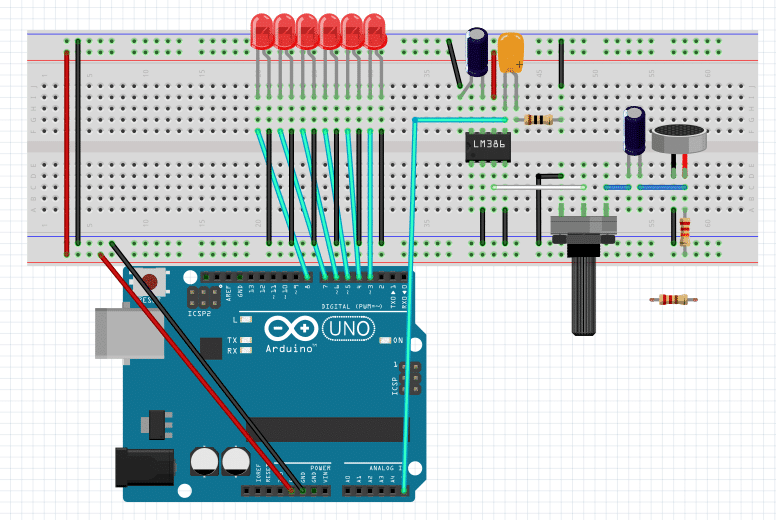
قم بتوصيل الدارة كما هو موضح بالصورة التالية :
توصيل وحدة DS3231 RTC :
| RTC Module |
Arduino |
| 5v |
Vcc |
| GND |
Gnd |
| SCL |
A5 |
| SDA |
A4 |
تقوم وحدة الRTC بحساب التوقيت و ارساله الى الاردوينو ليتم عرضه على شاشة LCD ، المفاتيح تستخدم لضبط التوقيت في البداية فقط.
البرمجة
قم بتنزيل الكود البرمجي كاملا من خلال الرابط هنـا .
شرح البرمجة :
حتى نتمكن من التواصل مع RTC Module بإستخدام الاردوينو، نحتاج الى إستخدام بروتوكول I2C و الذي تتيحه لنا المكتبة Wire.h.
لذلك في البداية نقوم بإدراج مكتبة Wire.h ، التي تحتوى على الدوال اللازمة للتواصل بين الاردوينو و الـ RTC Module .كما نقوم أيضا بإدراج مكتبة LiquidCrystal.h التي تحتوي على الدوال الخاصة بشاشة الـ LCD، و التي سيتم إستخدمها لعرض التوقيت.
#include <Wire.h>
#include <LiquidCrystal.h>
نقوم بعد ذلك بتسمية منافذ الأردوينو التي تم استخدامها في المشروع والخاصة بالـ Push Buttons.
#define ENTER A2
#define UP A1
#define DOWN A0
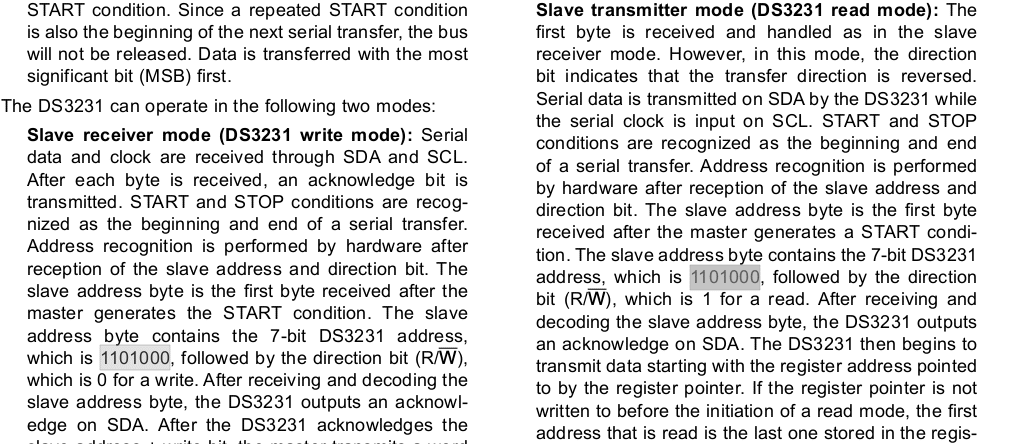
بعد ذلك قمنا بتحديد عنوان خاص بالRTC Module و هو 0x68 و قمنا بتعيين متغير له :
#define DS3231_I2C_ADDRESS 0x68
أي وحدة تستخدم برتوكول I2C تمتلك عنوان معين ليتمكن الاردوينو من التواصل معه. لان هذا البرتوكول يستطيع التواصل مع عدد كبير من الاجهزة على نفس الـProtocol Bus . لذلك كل واحد منها يمتلك عنوان معين ليستطيع الاردوينو التواصل معه بدون التأثير على باقي الاجهزة الموصلة على الـ Busـ
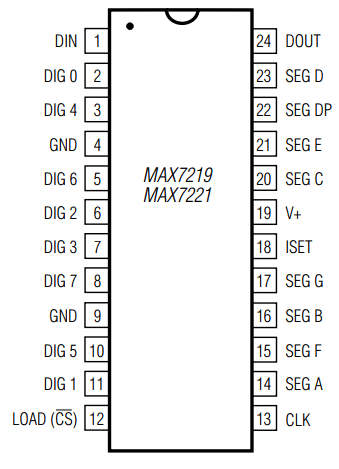
يتم الحصول على العنوان الخاص بكل موديول من الـ Datasheet الخاصه به :
ثم نقوم بإنشاء المتغير الخاص بشاشة الـ LCD، وتحديد الـ Pins الموصوله بينها وبين الأردوينو :
LiquidCrystal lcd(2, 3, 4, 5, 6, 7);
ونقوم بالإعلان عن المتغيرات المستخدمه في تخزين حالة الـ Push Buttons، والتي ستيم استخدامها في البداية لضبط التوقيت فقط. كما نقوم أيضا بالإعلان عن متغيرات لحفظ التوقيت الذي سنقوم بضبطه مثل متغير SetM و SetH .
//variables for button states
int enterState = 0, enterStateLast = 0, upState = 0, upStateLast = 0, downState = 0, downStateLast = 0;
//variables for ui
boolean blinkOn = true; //visibility of ':' between hour and minutes
boolean setVisible = false; //visibility of the set time ui
//variables for new time
int setM = 0; //users new minute value
int setH = 0; //users new hour value
هذا الموديول يتعامل مع الارقام على النظامBinary Coded Decimal . أي اننا سوف نحتاج لضبط التوقيت في البداية إلى تحويل الأعداد من الصورة Decimal إلى الصورة BCD . لذلك نستخدم الدالة ()decToBcd.
//convert normal decimal numbers to binary coded decimals
byte decToBcd(byte val)
{
return ( (val / 10 * 16) + (val % 10) );
}
وعند قراءة قيمة الوقت من الموديول نستخدم الدالة ()bcdToDec ، لتحويل التوقيت المرسل من الموديول من الصورة BCD الى الصورة Decimal ، لنتمكن من عرضها على الشاشة LCD.
//convert binary coded decimal to normal decimal numbers
byte bcdToDec(byte val)
{
return ( (val / 16 * 10) + (val % 16) );
}
الدالة ()setup نقوم بضبط الإعدادات اللازمة للمشروع، مثل تشغيل بروتوكول I2C و شاشةالـ LCD و قمنا بضبط المفاتيح المستخدمة في ضبط التوقيت كمدخل.
//code that runs once at setup
void setup() {
//start wire and lcd
Wire.begin();
lcd.begin(16,2); //(col, rows)
//intialize buttons as inputs
pinMode(ENTER, INPUT);
pinMode(UP, INPUT);
pinMode(DOWN, INPUT);
}
الدالة ()loop نقوم بقراءة الـPush Buttons لضبط التوقيت في البداية ثم نقوم بالتواصل مع الـRTC Module و نعرض التوقيت على الشاشة LCD .
void loop() {
checkButtons();
printTime();
}
الدالة ()setRTCTime تقوم بإنشاء اتصال بين الأردوينو و الـ RTC Module بإستخدام مكتبة Wire. وظيفة هذه الداله هو ضبط التوقيت الذي سنقوم بإدخاله بإستخدام الـ Push Buttons. في البداية تقوم بإرسال عنوان الجهاز الذي تريد الإتصال معه وفي حالتنا هنا هو RTC Module و الذي قمنا بتحديده في بداية الكود.
//set the time and date to the RTC
void setRTCTime(byte second, byte minute, byte hour, byte dayOfWeek, byte
dayOfMonth, byte month, byte year)
{
// sets time and date data to DS3231
Wire.beginTransmission(DS3231_I2C_ADDRESS);
Wire.write(0); // set next input to start at the seconds register
Wire.write(decToBcd(second)); // set seconds
Wire.write(decToBcd(minute)); // set minutes
Wire.write(decToBcd(hour)); // set hours
Wire.write(decToBcd(dayOfWeek)); // set day of week (1=Sunday, 7=Saturday)
Wire.write(decToBcd(dayOfMonth)); // set date (1 to 31)
Wire.write(decToBcd(month)); // set month
Wire.write(decToBcd(year)); // set year (0 to 99)
Wire.endTransmission();
}
بعد ذلك تقوم بإرسال التوقيت الذي تم ضبطه مع ملاحظة أننا عندما نرسل البيانات الى الموديول نقوم بتحويلها الى الصورة BCD .
Wire.write(decToBcd(minute));
بعد إرسال كل البيانات الخاصة بالتوقيت وهي الثواني والدقائق والساعات والأيام والشهور والسنة، نقوم بإنهاء الإتصال لكي يقوم الموديول بمعالجة هذه البيانات في ضبط التوقيت الخاص به.
الدالة ()readRTCTime تقوم بعمل إتصال مع الموديول و قراءة معلومات التوقيت منه. وسيتم استخدامها في الحصول على التوقيت وعرضه.
وهي تعمل بنفس اسلوب الداله السابقة مع اختلاف اننا نقوم بقراءة البيانات من الموديول بدلا من إرسالها له، مع ملاحظة اننا في هذه الحاله نقوم بتحويلها من الصورة BCD الى الصورة Decimal .
//read the time and date from the RTC
void readRTCTime(byte *second, byte *minute, byte *hour, byte *dayOfWeek,
byte *dayOfMonth, byte *month, byte *year)
{
Wire.beginTransmission(DS3231_I2C_ADDRESS);
Wire.write(0); // set DS3231 register pointer to 00h
Wire.endTransmission();
Wire.requestFrom(DS3231_I2C_ADDRESS, 7);
// request seven bytes of data from DS3231 starting from register 00h
*second = bcdToDec(Wire.read() & 0x7f);
*minute = bcdToDec(Wire.read());
*hour = bcdToDec(Wire.read() & 0x3f);
*dayOfWeek = bcdToDec(Wire.read());
*dayOfMonth = bcdToDec(Wire.read());
*month = bcdToDec(Wire.read());
*year = bcdToDec(Wire.read());
}
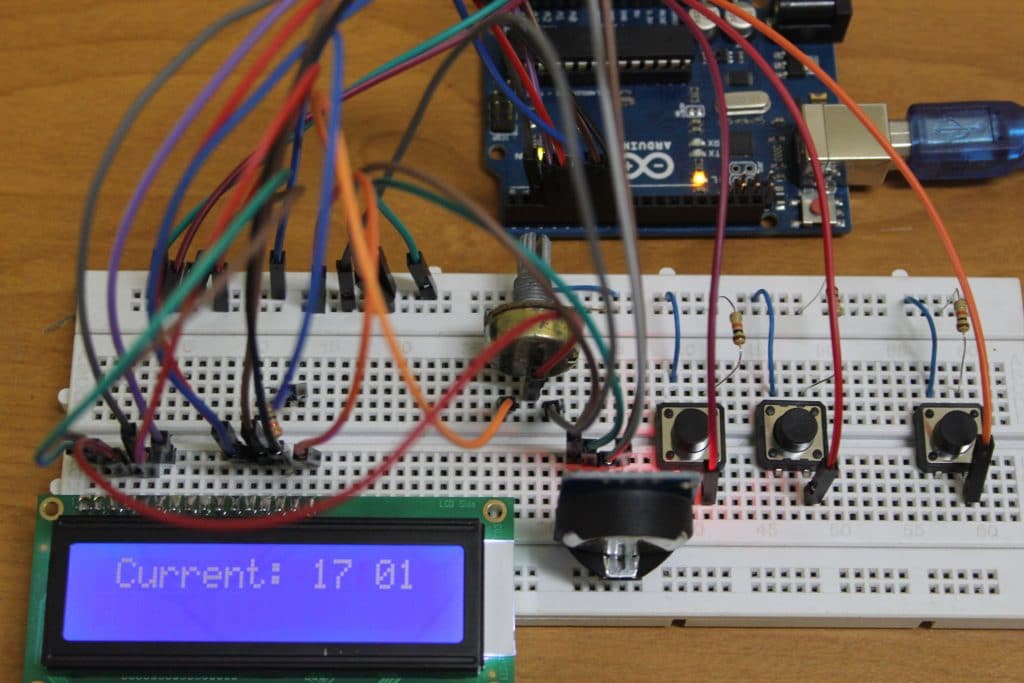
الدالة ()printTime تقوم بقراءة قيمة التوقيت من الموديول بإستخدام الدالة ()readRTCTime ثم تقوم بعرضها على الشاشة LCD مع اضافة كود مهمته عرض التوقيت على الصورة HH : MM .
//reads the RTC time and prints it to the top of the LCD
void printTime()
{
byte second, minute, hour, dayOfWeek, dayOfMonth, month, year;
//retrieve time
readRTCTime(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year);
//print to lcd top
lcd.setCursor(0,0);
lcd.print(" Current: ");
if (hour<10)
{
lcd.print("0");
}
lcd.print(hour, DEC);
if (blinkOn == true)
{
lcd.print(" ");
blinkOn = false;
}
else if (blinkOn == false)
{
lcd.print(":");
blinkOn = true;
}
if (minute<10)
{
lcd.print("0");
}
lcd.print(minute, DEC);
delay(100);
}
الجزء السابق مختص بقراءة قيمة التوقيت الذي يقوم الRTC Module بحسابه بدون تدخل من المستخدم . الجزء التالي من الكود مختص بقراءة حالة المفاتيح لضبط التوقيت و ارسالة الى الRTC Module.
الدالة ()checkButtons تقوم بقراءة حالة المفاتيح و التي تعمل كالتالي :
المفتاح المسمى UP يقوم بزيادة عداد الدقائق والساعات.
المفتاح المسمى DOWN يقوم بإنقاص عداد الدقائق والساعات.
المفتاح المسمى ENTER يقوم بتطبيق التوقيت الذي تم ضبطه وإرساله الى الـRTC Module.
//checks if buttons are pressed and responds accordingly
void checkButtons()
{
//check enter
enterState = digitalRead(ENTER);
if (enterState != enterStateLast)
{
if (enterState == HIGH)
{
if (setVisible == true)
{
byte second, minute, hour, dayOfWeek, dayOfMonth, month, year;
readRTCTime(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year);
setRTCTime(0, setM, setH, dayOfWeek, dayOfMonth, month, year);
}
else if (setVisible == false)
{
showSet();
}
}
}
enterStateLast = enterState;
//check up
upState = digitalRead(UP);
if (upState != upStateLast)
{
if (upState == HIGH)
{
if (setVisible == true)
{
addMin();
printSetTime();
}
else if (setVisible == false)
{
showSet();
}
}
}
upStateLast = upState;
//check down
downState = digitalRead(DOWN);
if (downState != downStateLast)
{
if (downState == HIGH)
{
if (setVisible == true)
{
subMin();
printSetTime();
}
else if (setVisible == false)
{
showSet();
}
}
}
downStateLast = downState;
}
الدالة ()showSet تقوم بعرض التوقيت الذي نقوم بضبطه في أسفل الشاشة قبل إرساله الى الموديول لكي لا نقوم بإرسال توقيت خاطئ بشكل غير مقصود.
//displays the new time interface in the bottom of the LCD
void showSet ()
{
//update new time variables to current RTC values
byte second, minute, hour, dayOfWeek, dayOfMonth, month, year;
readRTCTime(&second, &minute, &hour, &dayOfWeek, &dayOfMonth, &month, &year);
setH = hour, DEC;
setM = minute, DEC;
//pints to the LCD
lcd.setCursor(0,1);
lcd.print(" New: ");
printSetTime();
setVisible = true;
}
الدالة ()printSetTime تستخدمها الدالة ()showSet لعرض التوقيت الذي تم ضبطه في اسفل الشاشة LCD .
//prints the new time values on the bottom of the LCD
void printSetTime()
{
lcd.setCursor(8,1);
if (setH<10)
{
lcd.print("0");
}
lcd.print(setH);
lcd.print(":");
if (setM<10)
{
lcd.print("0");
}
lcd.print(setM);
}
الدوال التالية مستخدمة في الجزء السابق من الكود وهي تقوم بضبط المتغيرات التي تستخدم في تخزين قيم الدقائق والساعه التي يقوم المستخدم بضبطها بواسطة الPush Buttons .
الدالة ()addMin تقوم بزياد عداد الدقائق عند الضغط على المفتاح UP و تقوم أيضا بعمل اختبار لعداد الدقائق فإذا وصل العدد الى 59 تقوم بزيادة عداد الساعات .
//adds a minute to new time
void addMin()
{
if (setM < 59)
{
setM++;
}
else if (setM == 59)
{
setM = 0;
addHr();
}
}
الدالة ()subMin تعمل عكس عمل الدالة السابقة وهي تقوم بإنقاص عداد الدقائق عند الضغط على المفتاح DOWN وتقوم أيضا باختبار عداد الدقائق فإذا وصل الى 0 تقوم بإنقاص عداد الساعات.
//subtracts a minute from new time
void subMin()
{
if (setM > 0)
{
setM--;
}
else if (setM == 0)
{
setM = 59;
subHr();
}
}
الدالة ()addHr نقوم بإستدعائها الدالة ()addMin عندما يصل عداد الدقائق الى 59 لتقوم بزيادة عداد الساعات بمقدار واحد.
//adds an hour to new time
void addHr ()
{
if (setH < 23)
{
setH++;
}
else if (setH == 23)
{
setH = 0;
}
}
الدالة ()subHr تقوم باستدعائها الدالة ()subMin عندما يصل عداد الدقائق الى 0 لتقوم بإنقاص عداد الساعات بمقدار واحد.
//subtracts an hour from new time
void subHr ()
{
if (setH > 0)
{
setH--;
}
else if (setH == 0)
{
setH = 23;
}
}