اردوينو – الدرس الرابع عشر – محرك التيار المستمر DC motor
مقدمة
في هذا الدرس ستتعلم كيف تتحكم بدوران محرك التيار المستمر الصغير DC Motor بإستخدام الاردوينو.
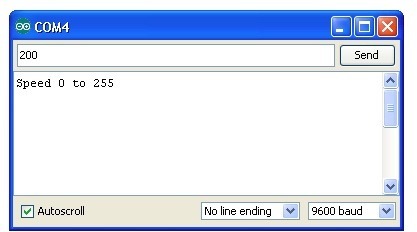
ستقوم بإستخدام خاصية تغيير المخرج التناظري ‘Pulse Width Modulation – pwm’ بالاردوينو وذلك للتحكم في سرعة المحرك عبر ارسال رقم مابين 0 و 255 من شاشة الاتصال التسلسلي Serial Monitor.
المواد والأدوات
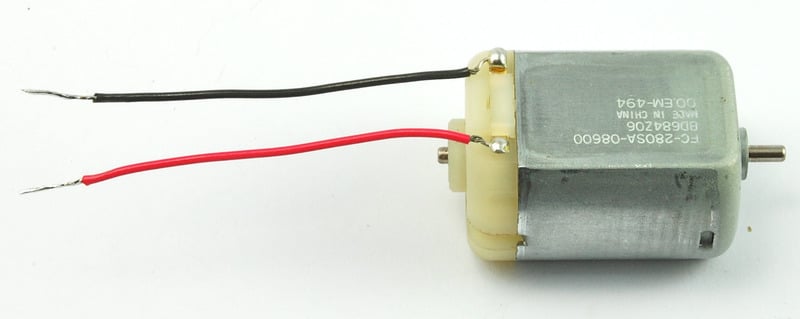
1× محرك التيار المستمر الصغير (6V DC Motor)


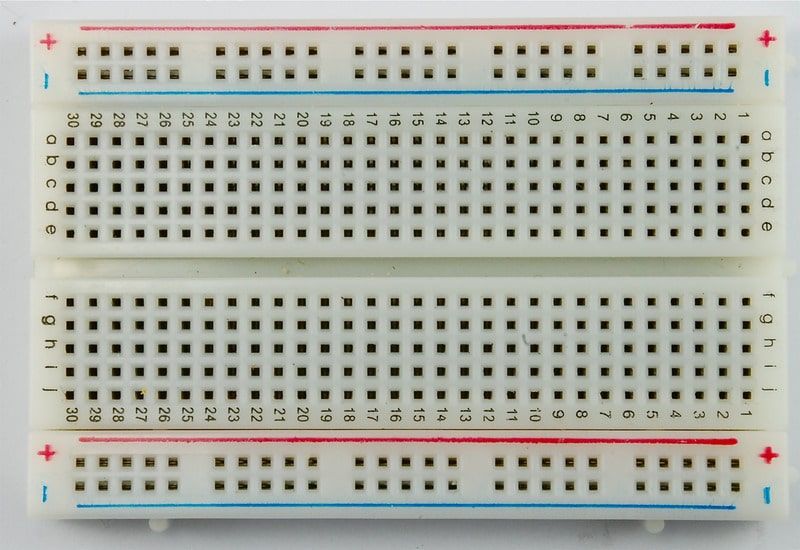
1× لوحة التجارب (Half-size Breadboard)
1× اردوينو اونو

1× سلك اردوينو
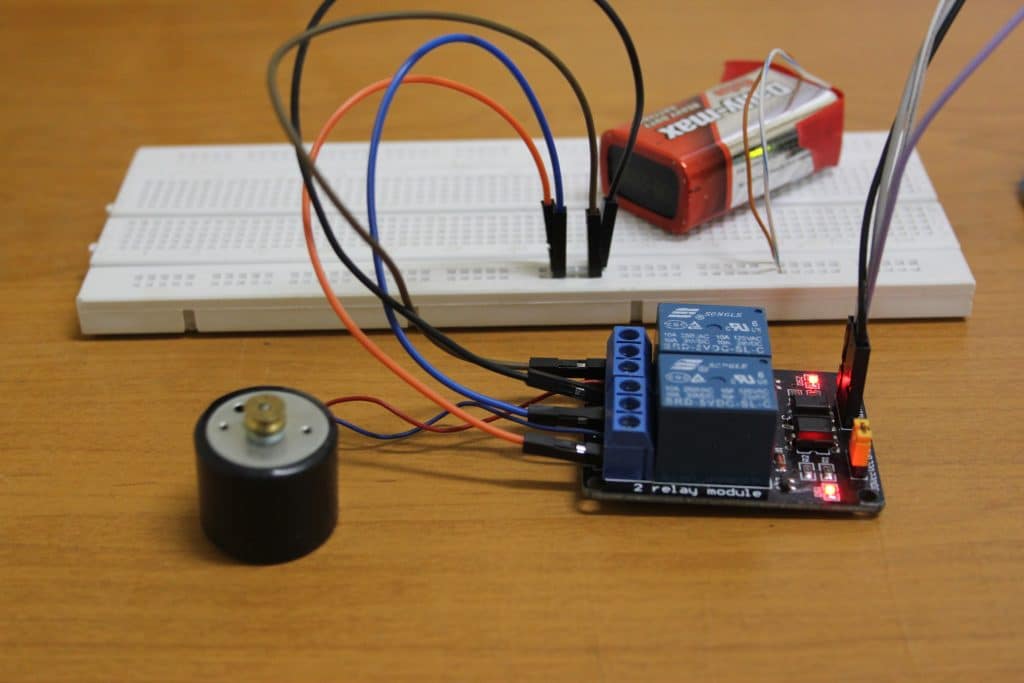
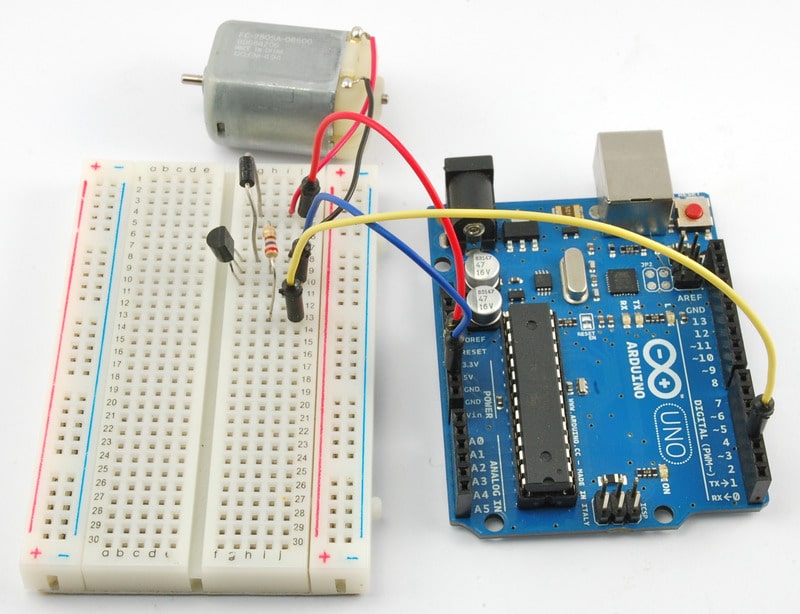
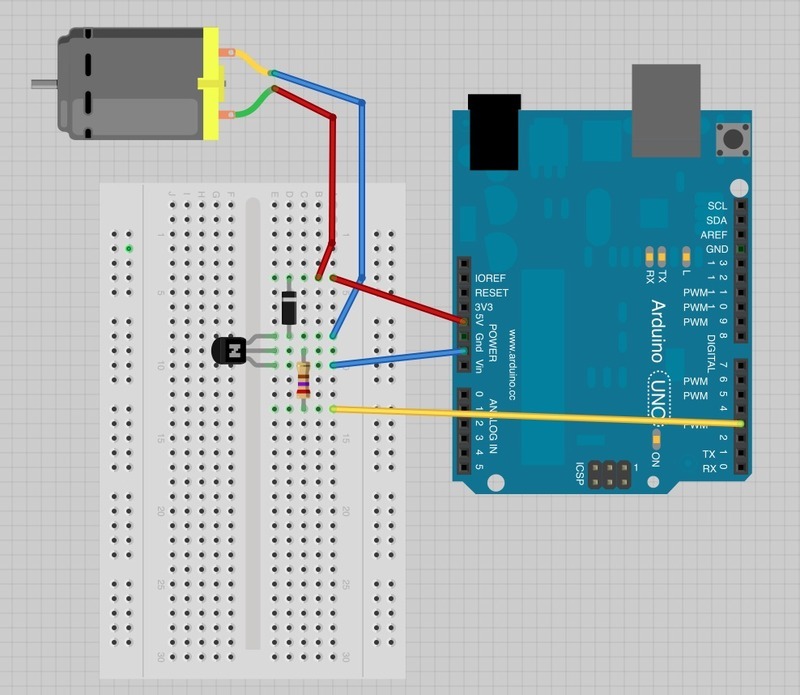
توصيل الدائرة
عند وضع القطع على لوح التجارب عليك ان تحرص على صحة اتجاه وموضع الترانزستور والصمام الثنائي ‘diode’ كما في الصورة.
الكود البرمجي
ارفع الكود التالي على متحكم الاردوينو:
int motorPin = 3;
void setup()
{
pinMode(motorPin, OUTPUT);
Serial.begin(9600);
while (! Serial);
Serial.println("Speed 0 to 255");
}
void loop()
{
if (Serial.available())
{
int speed = Serial.parseInt();
if (speed >= 0 && speed <= 255)
{
analogWrite(motorPin, speed);
}
}
}
يؤدي الترانزستور هنا وظيفة المحول ‘switch’ وذلك عبر التحكم بطاقة المحرك. نقوم بإستخدام منفذ 3 للأردوينو لتشغيل وإطفاء الترانزستور تحت اسم ‘motorPin’.
عند بدء البرنامج ستظهر شاشة الاتصال التسلسلي Serial Monitor تطلب منك ادخال قيمة طاقة المحرك ( مابين 0 و 255 ).
في دالة loop الأمر ‘Serial.parseInt’ يستخدم لقراءة الرقم المدخل عبر شاشة الاتصال التسلسلي Serial Monitor وتحويله لقيمة رقمية ‘int’.
بإمكنك ادخال أي رقم ، جملة if الشرطية في السطر الذي يليه تقوم بكتابة تناظرية ‘analogWrite’ عند وجود رقم بين 0 و 255 فقط..
الترانزستور Transistor
يمكن للمحرك الصغير أن يستهلك طاقة أكبر مما قد ينتجه المخرج الرقي digital output للاردوينو لذلك هناك احتمال كبير أن يتم اتلاف متحكم الأردوينو اذا قمت بربطها بالمحرك مباشرة.
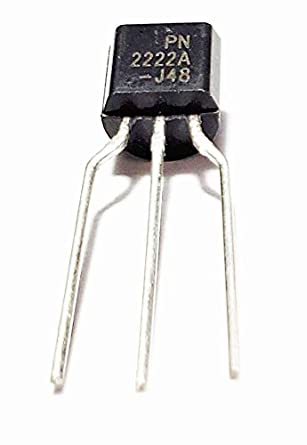
ترانزستور صغير يدعى PN2222 يمكن استخدامه كمحول يستهلك طاقة قليلة من الأردوينو ويمكن أن يوفر طاقة أكبر للمحرك الصغير.
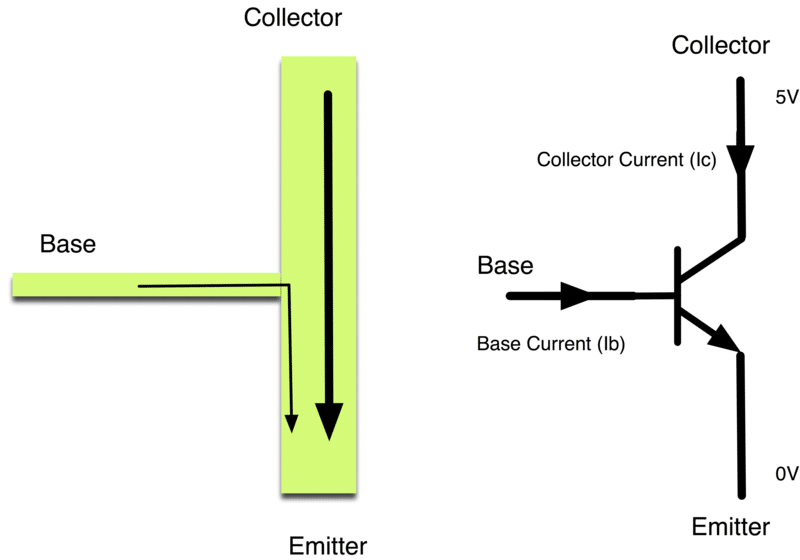
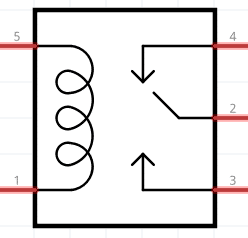
للترانزستور 3 رؤوس . معظم التيار الكهربائي يذهب من ‘collector’ إلى ‘Emitter’، ولكن هذا يحدث فقط إذا تم تمرير تيار قليل عبر ‘Base connection’. هذا التيار القليل يتم توفير ه من الاردوينو.
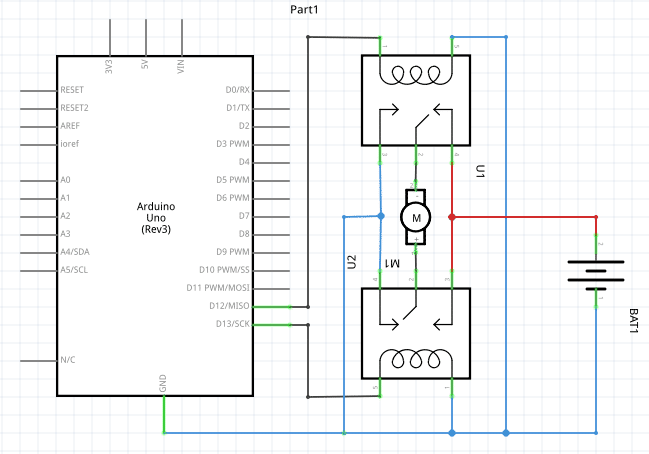
الرسم التالي يسمى رسم تخطيطي ‘schematic diagram’. مثل تصميم لوح التجارب ، وظيفته اظهار كيفية ارتباط القطع الالكترونية ببعضها.
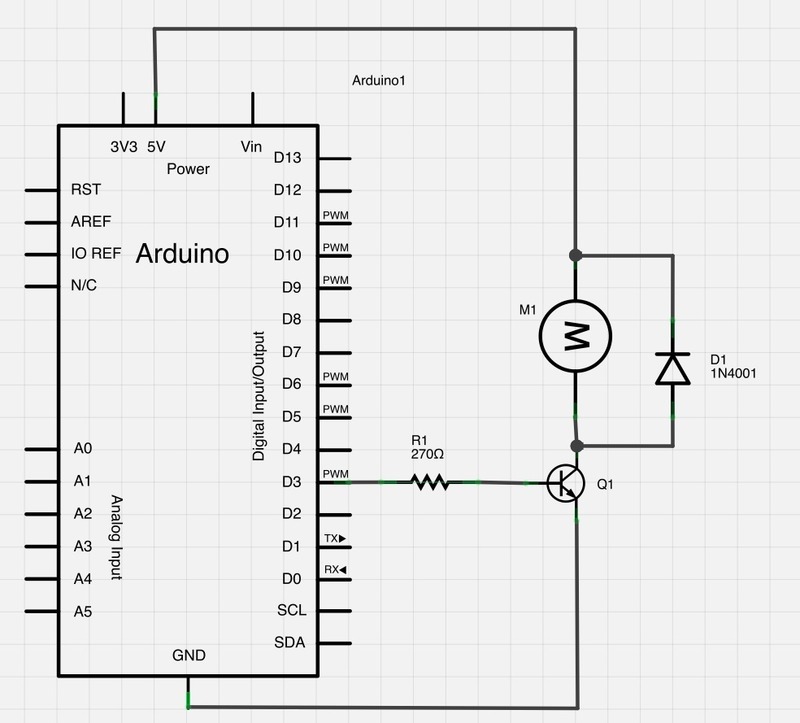
المنفذ 3 من الأردوينو مرتبط بالمقاومه . مما يقلل من التيار الموجه إلى الترانزستور.
يوجد صمام ثنائي ‘Diode’ موصول والذي يسمح بنقل التيار بإتجاه واحد فقط.
عند فصل الطاقة عن المحرك ، يحصل ارتداد جهد عكسي مما قد يتلف الأردوينو ، وظيفة الصمام الثنائي ‘Diode’ هي الحماية من هذه الامور.
أنشطة أخرى
حاول تجربة ادخال مختلفه في كل مره لمشاهدة التأثير على المحرك الصغير .