روبوت السومو
مصارعة السومو من الفنون القتالية اليابانية القديمة، سنقوم في هذا المشروع ببرمجة الروبوت ليكون جاهزًا للمشاركة بحيث يقوم الروبوت بالبحث عن الخصم في مساحة محددة بواسطة مستشعر الموجات فوق الصوتية وعندما يجده يقوم بالهجوم على الروبوت الخصم.
الأدوات المطلوبة:

mBot Kit (عدد 2)
فكرة المشروع
سنقوم في هذا المشروع باستخدام مستشعر الموجات فوق الصوتية ووحدة تتبع المسار. بحيث يتحرك الروبوت على ساحة المعركة دون الخروج من الحدود المرسومة باللون الأسود باستخدام مستشعر تتبع المسار.
يعطي المستشعر قراءة تساوي 3 إذا كان على سطح أبيض وقراءة تساوي 0 إذا كان على سطح أسود، وقيم تساوي 1 أو 2 إذا كانت إحدى جهتي المستشعر على اللون الأسود والأخرى على الأبيض. لفهم كيفية عمل مستشعر وحدة المسار راجع مشروع روبوت تفادي السقوط
خلال حركة الروبوت على الطاولة يقوم بالبحث عن الخصم باستخدام مستشعر الموجات فوق الصوتية
عندما يكون الخصم على مسافة قريبة تصطدم به الموجات فوق الصوتية وترتد إلى الروبوت فيتم رصد الخصم والهجوم عليه بزيادة السرعة.
لفهم كيفية عمل مستشعر الموجات فوق الصوتية راجع مشرع الروبوت متتبع الكائنات
| رصد حافة الطاولة | رصد الخصم | الفعل |
| نعم | نعم | الانعطاف يمينًا أو يسارًا |
| نعم | لا | الانعطاف يمينًا أو يسارًا |
| لا | نعم | زيادة السرعة (هجوم) |
| لا | لا | التحرك للأمام |
الكود البرمجي
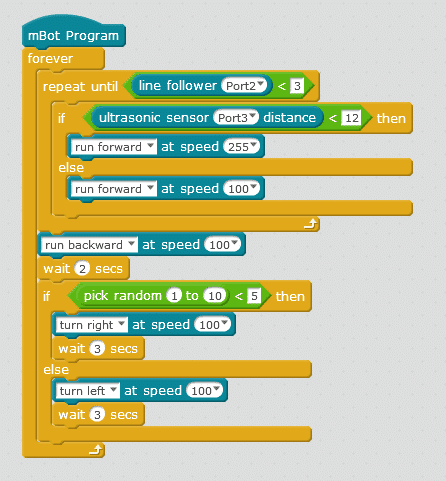
سنحتاج عند برمجة روبوت السومو إلى وضع الأوامر باعتبار قراءة مستشعر تتبع المسار ومستشعر الموجات فوق الصوتية.
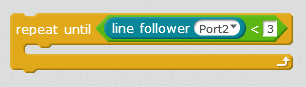
سنقوم بدايةً بوضع مجموعة من الأوامر داخل حلقة تكرار Repeat until ، يقوم هذا الأمر بتنفيذ الأوامر التي بداخل الحلقة إلى أن يتحقق الشرط الذي يتم وضعه
وهنا قمنا باختيار الشرط أن تساوي قراءة مستشعر تتبع المسار 3
(عندما تكون القيمة 3 فذلك يعني أن كلا المستشعرين في وحدة تتبع المسار على سطح أبيض أي أن الروبوت لم يصل لحافة ساحة القتال)
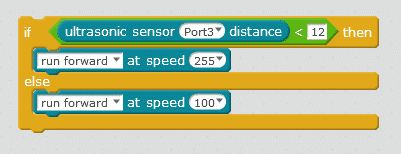
الأوامر التي بداخل حلقة repeat until ستعتمد على المسافة على قراءة مستشعر الموجات فوق الصوتية ، أي إذا كان الروبوت يسير على السطح الأبيض سننتقل لاختبار شرط المسافة
وهو إذا كانت المسافة بين الروبوت والخصم أقل من 12 سم سيقوم بالهجوم عليه عن طريق زيادة السرعة إلى 255، وإن لم تكن المسافة كذلك يستمر الروبوت في الحركة للأمام بسرعة متوسطة
نعود إلى شرط مستشعر تتبع المسار
إذا تحقق الشرط أن القراءة أصغر من 3، فذلك يعني أن الروبوت لم يعد على السطح الأبيض أي وصل إلى حافة ساحة القتال
فهنا يتم تنفيذ الأوامر بعد else، وهي الحركة للخلف لمدة ثانيتين وفائدة الأمر wait أن يسمح له بالرجوع مسافة كافية تمكنه من الانعطاف

بعد أن يعود الروبوت للخلف هل ينعطف يمينا أو يسارًا؟
ليتمكن الروبوت من اتخاذ القرار
سنستخدم الأمر pick random من 1 إلى 10
وهذا الأمر يقوم في كل مرة بأخذ رقم عشوائي بين العددين اللذان تم اختيارهما
وتبعا لهذا الرقم قمنا بوضع شرط إذا كان الرقم أقل من 5 ينعطف الروبوت لليمين
وإلا فينعطف لليسار
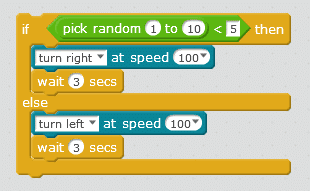
قمنا بوضع أمر التأخير الزمني.wait ليكون لدى الروبوت زمن كافي للانعطاف
الكود البرمجي
بذلك سيكون الروبوت جاهزًا للمشاركة في مسابقة السومو قم بتنزيل الكود على روبوت آخر لتبدأ المنافسة.
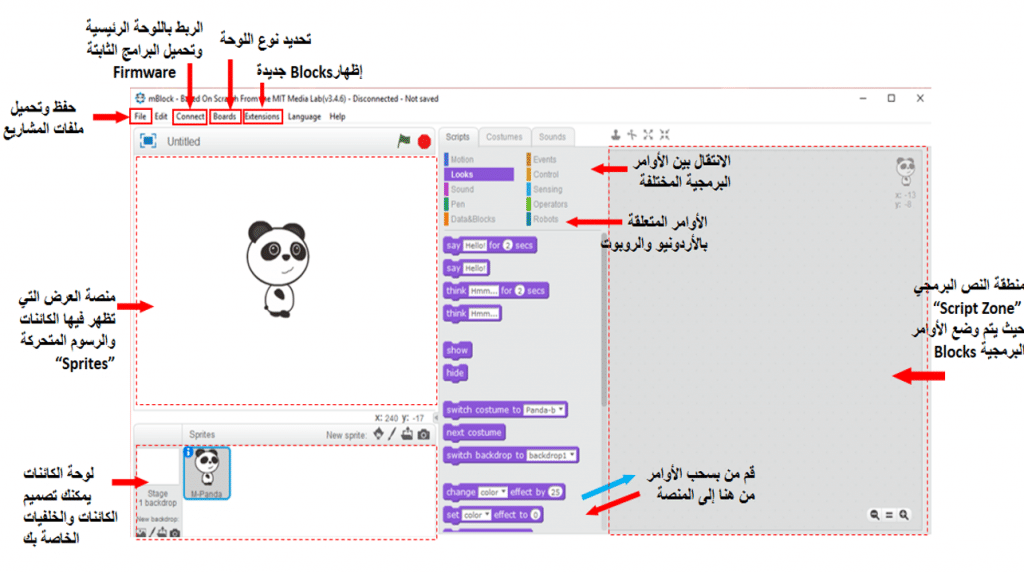
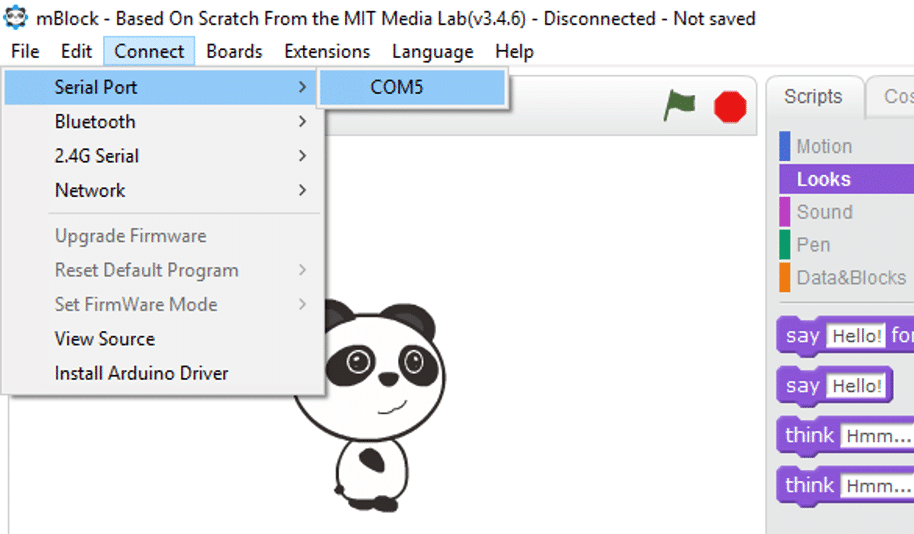
لمزيد من المعلومات حول الأوامر البرمجية الأخرى يمكنك مراجعة درس جولة حول الأوامر البرمجية.