جولة حول الأوامر البرمجية
يتواصل البشر فيما بينهم بلغات مختلفة مثل العربية والانجليزية وغيرها
وللتواصل مع الروبوتات نحتاج كذلك إلى لغات برمجة ومن أبسط لغات البرمجة المرئية هي لغة سكراتش Scratch التي سنستخدمها في برنامج mBlock لبرمجة روبوتات MakeBlock.
في هذا الدرس سنأخذ جولة على الأوامر البرمجية الأكثر استخداما في بناء الروبوتات والمشاريع المختلفة.
الأوامر البرمجية
تنقسم الأوامر البرمجية في برنامج mBlock إلى عدة أقسام منها ما هو متعلق بالحركة أو الأصوات أو التحكم وغيرها
والتي تمكننا من برمجة الرسوم المتحركة والألعاب التفاعلية.
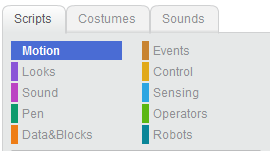
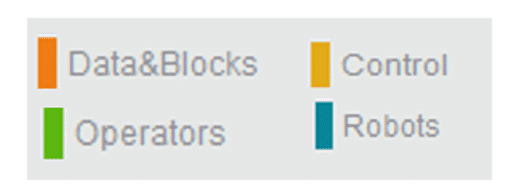
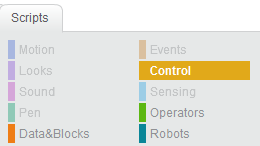
لكن عند كتابة برنامج والرغبة في رفعه على لوحة الروبوت فإن 4 أقسام فقط من الأوامر البرمجية يمكن استخدامها
وهي المتعلقة بالبيانات والتحكم والعمليات والروبوت كما هو موضح في الصورة.
سنستعرض الآن كل قسم وأكثر الأوامر البرمجية استخدامًا.
القسم الأول: البيانات Data and Blocks
 |
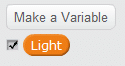 |
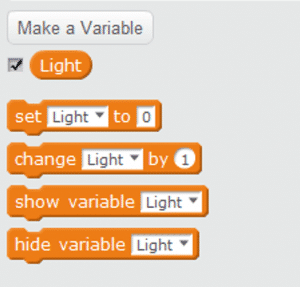
يستخدم هذا الأمر لإنشاء المتغيرات وتعيين قيمة المتغير
والمتغير يمكن تشبيهه بوعاء لتخزين البيانات مثل إنشاء متغير باسم Light يقوم بتخزين قراءة مستشعر الضوء |
|
|
تعيين قيمة للمتغير | |
|
|
تغيير قيمة المتغير بمقدار معيّن | |
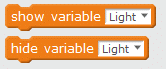 |
إظهار أو إخفاء قيمة المتغير |
القسم الثاني: أوامر التحكم Control
|
|
يستخدم الأمر البرمجي wait لإضافة تاخير زمني بين أمرين برمجين |
 |
يقوم هذا الأمر بتكرار الأوامر البرمجية التي توضع داخله عدد محدد من المرات |
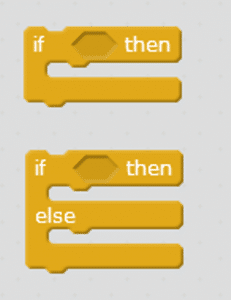 |
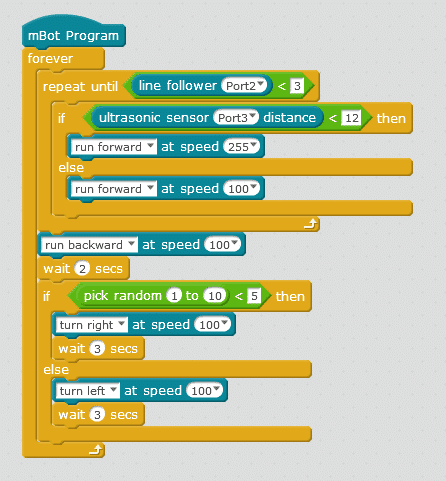
If.. then يقوم هذا الأمر بالتحقق من الشرط، إذا كان الشرط صحيحا، سيتم تنفيذ التعليمات البرمجية داخل هذا الـ Block ، وإذا لم يتحقق الشرط لن يتم تنفيذها.If.. then.. else يقوم هذا الأمر بالتحقق من الشرط، إذا كان الشرط صحيحا، سيتم تنفيذ التعليمات البرمجية داخل Block if ، وإذا لم يتحقق الشرط يتم تنفيذ التعليمات البرمجية داخل else Block . |
|
|
يتوقف البرنامج عند الأمر البرمجي wait until حتى يتحقق الشرط الذي تم تحديده داخل الأمر Block عند تحقق الشرط يكمل البرنامج تنفيذ الأوامر التالية في الكود |
 |
يتم تكرار الأوامر البرمجية التي توضع بداخل الأمر Repeat until حتى يتحقق الشرط الذي تم تحديده عند تحقق الشرط ينتقل لتنفيذ الأوامر التالية في الكود |
القسم الثالث: أوامر العمليات Operators
 |
مجموعة الأوامر المتعلقة بالعمليات الحسابية (الجمع، الطرح ، الضرب، القسمة) |
|
|
Pick a random لاختيار رقم عشوائي من بين قيمتين مثلا بين 1 و 10 سيختار البرنامج كل مرة رقما مختلفا بين هاتين القيمتين |
 |
أكبر من .. أصغر من .. يساوي تستخدم الأوامر البرمجية للمقارنة بين قيمتين مختلفتين |
|
|
عند استخدام And يتم تنفيذ الكود البرمجي التالي إذا تحقق كلا الشرطين |
|
|
عند استخدام or يتم تنفيذ الكود البرمجي التالي إذا كان أحد الشرطين صحيحا |
|
|
يتم استخدامه لعكس الحالة المنطقية للمعامل إذا كان الشرط صحيحا فإن العامل المنطقي not يجعله خاطئا |
القسم الرابع: أوامر الروبوت Robot
في هذا القسم تظهر الأوامر وفق نوع الروبوت الذي تم اختيار من قائمة Boards
ونوع الامتداد من قائمة Extensions
 |
يشير هذا الأمر البرمجي Block إلى أن البرنامج سيتم ترجمته
إلى كود أردوينو وتحميله على لوحة mCoreعند اختيار نوع الروبوت mBot.
ويختلف مسمى هذا الأمر Block وفقًا لنوع لوحة الروبوت التي تستخدمها وتقوم باختيارها من قائمة Board. |
|
|
يقوم هذا الأمر البرمجي بإعطاء الأمر لجميع محركات الروبوت بالحركة إما للأمام أو الخلف أو لليمين أو اليسار وكذلك تحديد السرعة |
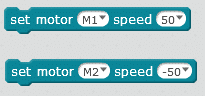 |
يستخدم لتحديد اتجاه وسرعة أحد المحركات M1 المحرك الأول M2المحرك الثاني عند اختيار السرعة قيمة موجبة (100) يتحرك للأمام عند اختيار قيمة سالبة ( -100 ) يتحرك للخلف |
|
|
يتم عبر هذا الأمر البرمجي التحكم بالإضاءة RGB LED المدمجة في اللوحة الرئيسية وشدة الإضاءة ودمج الألوان |
| يستخدم هذا الأمر البرمجي عند توصيل RGB LED خارجية باللوحة الرئيسية ويتم تحديد رقم منفذ التوصيل | |
|
|
يستخدم الأمر البرمجي play note لإصدار الأصوات مثل التنبيهات والنغمات عبر الطنان الكهربائي (Buzzer)المدمج في اللوحة الرئيسية |
|
|
يستخدم لقراءة مستشعر الضوء المدمج في اللوحة الرئيسية |
|
|
يستخدم عند توصيل مستشعر ضوء خارجي باللوحة الرئيسية بأحد المنافذ وتحديد وضع التشغيل إما On أو Off لإغلاقه |
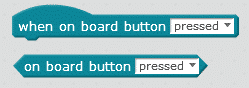 |
يستخدم لبرمجة المفتاح (push button) المدمج في اللوحة الرئيسية تحت هذا الأمر يتم وضع الأوامر البرمجية التي يطلب من البرنامج تنفيذها عند ضغط المفتاح |
|
|
يستخدم هذا الأمر لقراءة مستشعر الموجات فوق الصوتية ويتم تحديد المنفذ الذي تم توصيل المستشعربه |
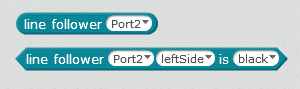 |
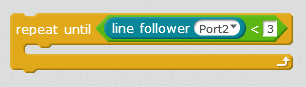
يستخدم هذا الأمرلقراءة مستشعر تتبع المسار وتحديد منفذ توصيل المستشعر |
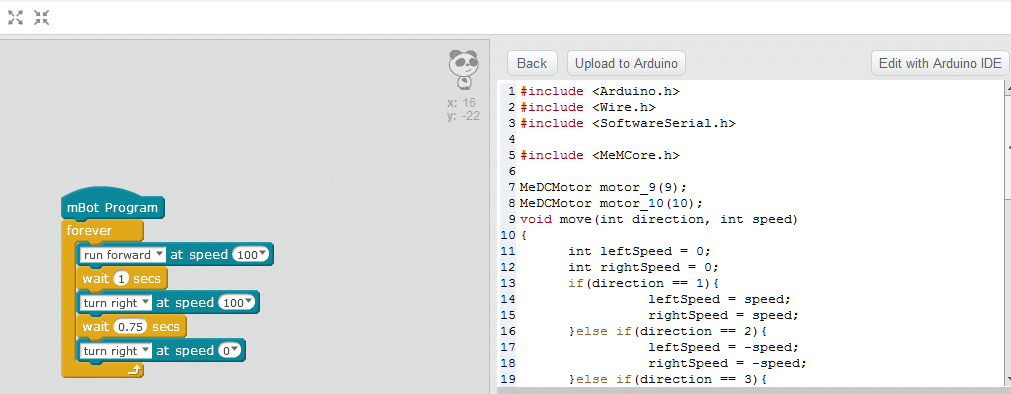
رفع الكود على لوحة الروبوت
عند الانتهاء من بناء الكود البرمجي الخاص بك قم بتوصيل الروبوت عبر كيبل USB واختيار رقم المنفذ الخاص بالروبوت
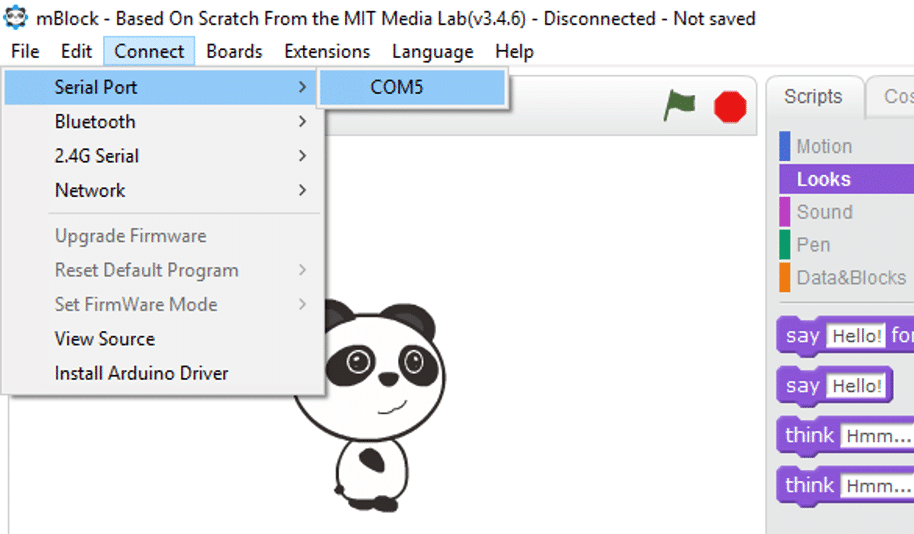
قم باختيار القائمة Edit ثم Arduino mode
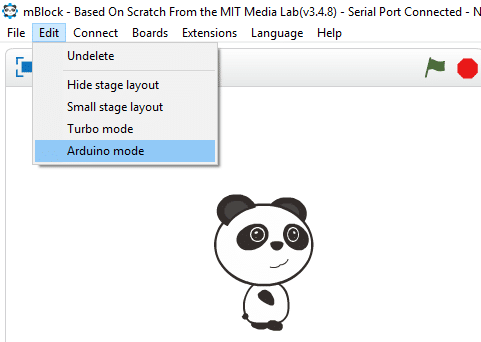
سيظهر الكود بلغة الأردوينو في يمين الشاشة، قم باختيار Upload to Arduino لرفع الكود على الروبوت