برمجة الروبوت
تستخدم وحدة تتبع المسار لبرمجة الروبوتات لتتبع مسارات معينة يتم رسمها باللون الأسود
في هذا الدرس سنستخدم وحدة تتبع المسار لرصد حواف السطح الذي يتحرك عليه الروبوت ويتفادى السقوط من عليه
سنقوم ببرمجة الروبوت بحيث يتحرك على طاولة بيضاء وينعطف يمينا عند الوصول إلى حافة الطاولة.
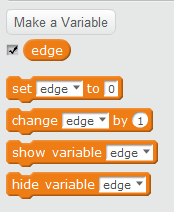
نقوم أولا بإنشاء متغير edge
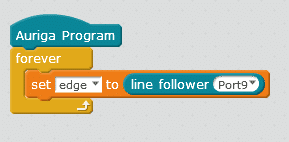
نقوم بتعيين قيمة المتغير لتخزين قراءة وحدة تتبع المسار
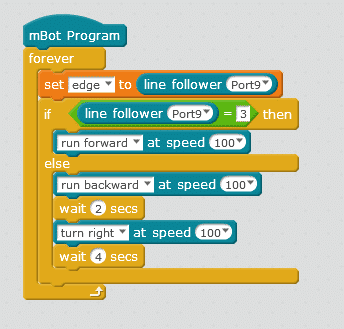
نستخدم الجملة الشرطية if else بحيث
إذا كانت قيمة قراءة المستشعر تساوي 3 يتم تنفيذ الأمر التالي وهو التحرك للأمام
عندما تكون القراءة 3 فذلك يعني أن كلا المستشعرين في وحدة تتبع المسار على اللون الأبيض

عندما يصل الروبوت إلى حافة الطاولة لن يكون كلا المستشعرين على اللون الأبيض وبالتالي لن تكون قراءة المستشعر تساوي3
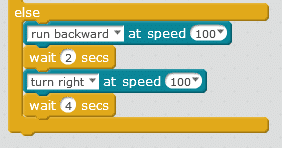
فيقوم الروبوت بتنفيذ الأوامر المكتوبة بعد الأمر else
وهي التحرك للخلف لمدة ثانيتين ثم الانعطاف نحو اليمين
نقوم بوضع أمر التأخير الزمني wait بعد أمر التحرك للخلف لكي نسمح للروبوت بالرجوع مسافة كافية حتى يتمكن من الانعطاف
ونضيف wait بعد أمر الانعطاف لليمين لتحديد مقدار الانعطاف ستحتاج إلى تغيير القيمة حسب شكل وحجم الطاولة التي لديك
الكود البرمجي:
لمعلومات أكثر حول الأوامر البرمجية الأخرى يمكنك العودة إلى درس جولة حول الأوامر البرمجية.