وحدة تتبع المسار Line Follower
تتكون وحدة تتبع المسار من مستشعرين كل مستشعر يتكون من مصدر للأشعة تحت حمراء (LED) ومستقبل لهذه الأشعة
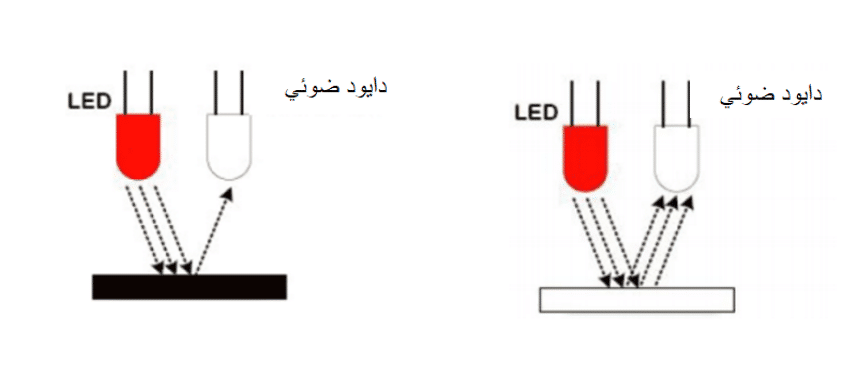
فكرة عمل مستشعر تتبع المسار تقوم على إطلاق أشعة تحت حمراء ورصد انعكاسها
عند سير الروبوت على الأسطح البيضاء فإن معظم الأشعة تنعكس من على السطح ويتم رصدها
أما عند سير الروبوت على الأسطح السوداء فإن اللون الأسود يمتص معظم الأشعة فلا ينعكس إلا مقدار بسيط منها إلى المستشعر
الأمر البرمجي لقراءة وحدة تتبع المسار
يعطي قيم بين 0 – 3 بناء على الحالات التالية
| الحالات | قيمة القراءة | المستشعر الأيمن | المستشعر الأيسر |
| كلا المستشعرين على اللون الأسود | 0 | ||
| المستشعر الأيسر فقط على اللون الأسود | 1 | ||
| المستشعر الأيمن فقط على اللون الأسود | 2 | ||
| كلا المستشعرين على اللون الأبيض | 3 |