في هذا المشروع سنتعلم فكرة عمل المرحل وكيفية استعماله للتحكم في تشغيل مروحة تعمل على محرك تيار مستمر و ايضا عكس اتجاه حركتها.
المكونات المطلوبة
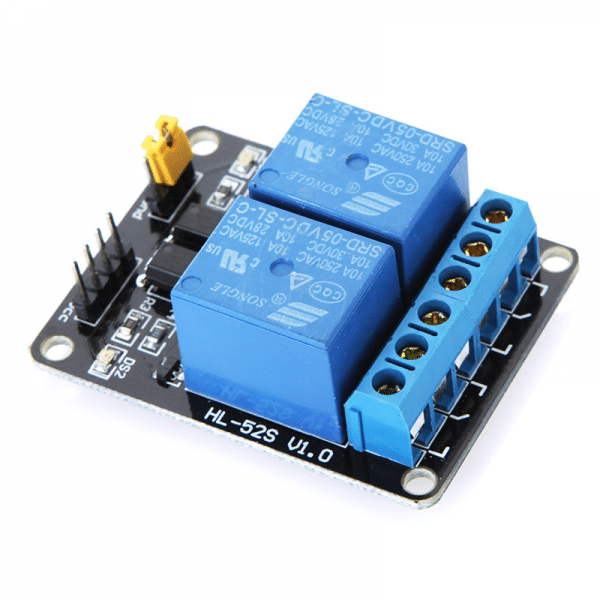



المرحل Relay
المرحل هو عبارة عن مفتاح كهروميكانيكي. وهذا يعني أنه يتكون من نقاط تلامس ولكنه يحتوي على ملف كهربائي. فائدة هذا الملف هو التحكم في توصيل وفصل نقاط التلامس للتحكم في الفصل والتشغيل في المرحل.
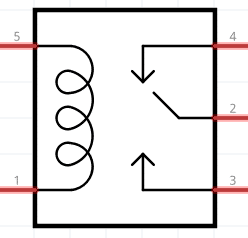
مكونات المرحل
- ملف كهربائي
- نقاط توصيل مغلقة ومفتوحة
لماذا يتم استخدام المرحل؟
لا يمكن توصيل مروحة التيار المستمر بشكل مباشر مع الاردوينو. وذلك بسبب احتياج المروحة إلى تيار عالي لا يستطيع الاردوينو اعطاءه لها. لذلك، نستخدم المرحل (Relay) كدائرة بين الاردوينو الذي يعمل بتيار صغير وبين المروحة التي تختاج إلى تيارات عالية.

مروحة التيار المستمر (DC Fan) :
هي عبارة عن محرك تيار مستمر مثبت عليه ريش ليعمل كمروحة. يتم التحكم بها بشكل مشابه للتحكم بمحرك التيار المستمر. يتم تشغيلها عن طريق امدادها بتيار مستمر، ولعكس حركتها سنقوم بعكس توصيل اطرافها أي عكس الاقطاب لتدور في الاتجاه المعاكس.

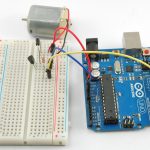
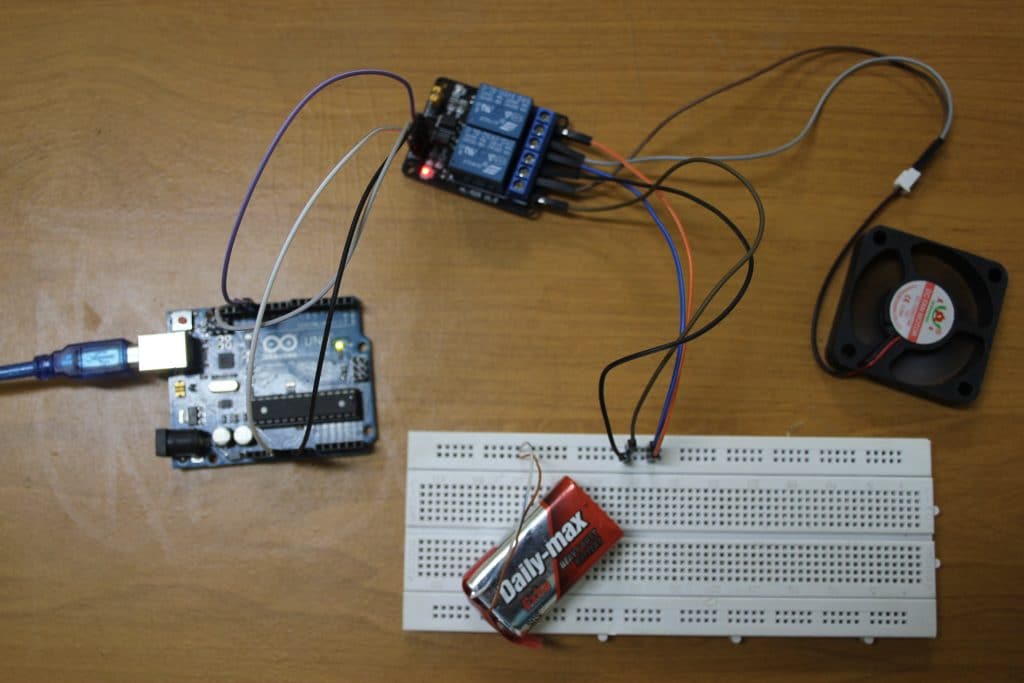
توصيل الدارة :
يتم توصيل الدارة كما هو موضح بالصورة التالية :
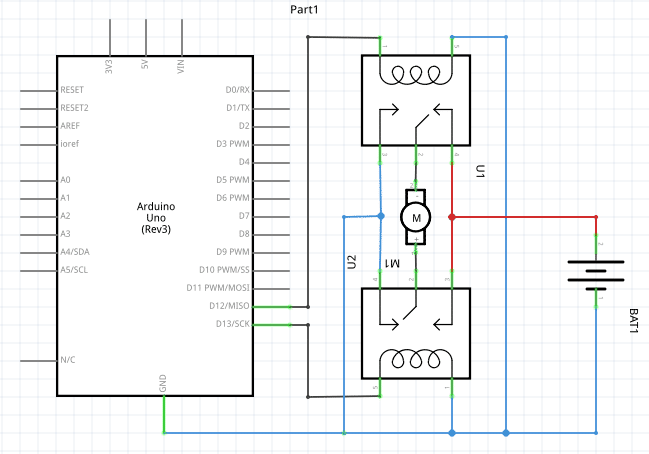
التوصيلات :
| طرفى المحرك | طرفى COM للRelay Module |
| طرف البطارية الموجب | طرفى NO للRelay Module |
| طرف البطارية السالب | طرفى NC للRelay Module |
| طرف Vcc للArduino | طرف Vcc لل Relay Module |
| طرف Gnd للArduino | طرف GND للRelay Module |
| طرف 12 للArduino | طرف IN1 للRelay Module |
| طرف 13 للArduino | طرف IN2 للRelay Module |
كيفية عمل الدارة
سيتم وصل طرفى المرحل (Relay) على منافذ من النوع الرقمي. لجعل المروحة تدور مع اتجاه عقارب الساعة، نقوم بجعل قيمة المخرج الأول HIGH والثاني LOW . ولدورانها عكس عقارب الساعة نقوم بعكس العملية السابقة. اما لجعلها تتوقف نقوم بجعل كلا الطرفان LOW .
الكود البرمجي :
قم بكتابة الكود البرمجي كما يلي :
#define MOTOR_IN1 12
#define MOTOR_IN2 13
void motor_forward(void); // a function that will be called to rotate it clockwise
void motor_reverse(void); // a function that will be called to totate it counter-clockwise
void motor_stop(void); // a function that will be called to stop the rotation
void setup() {
pinMode(MOTOR_IN1, OUTPUT); // set the first pin of the relay as output
pinMode(MOTOR_IN2, OUTPUT); // set the 2nd pin of the relay as output
}
void loop() {
motor_forward(); // move forward/clockwise
delay(3000); // keep rotating cw for 3 seconds
motor_stop(); // stop rotating
delay(3000); // stand still for 3 seconds
motor_reverse(); // reverse the rotation direction/ccw
delay(3000); // keep rotating ccw for 3 seconds
motor_stop(); // stop rotating
delay(3000); // stand still for 3 seconds
}
void motor_forward(void) // the function that will cause the motor to rotate cw
{
digitalWrite(MOTOR_IN1, HIGH);
digitalWrite(MOTOR_IN2, LOW);
}
void motor_reverse(void) // the function that will cause the motor to rotate ccw
{
digitalWrite(MOTOR_IN1, LOW);
digitalWrite(MOTOR_IN2, HIGH);
}
void motor_stop(void) // the function that will cause the motor to stop rotating
{
digitalWrite(MOTOR_IN1, LOW);
digitalWrite(MOTOR_IN2, LOW);
}
شرح الكود البرمجي :
تدور المروحة في الإتجاه الأول لمدة 3 ثوان، ثم تتوقف لمدة 3 ثوان. وبعد ذلك، تدور في الاتجاه المعاكس لمدة 3 ثوان ثم تتوقف لمدة 3 ثوان اخرى، وهكذا حتى يتم فصل التيار.
الشرح مفصلا :
يتم ضبط المنافذ الموصله مع المرحل IN1، IN2 كمخرج :
void setup() {
pinMode(MOTOR_IN1, OUTPUT); // set the first pin of the relay as output
pinMode(MOTOR_IN2, OUTPUT); // set the 2nd pin of the relay as output
}
في دالة الـ ()loop ، نقوم باستدعاء الدالة ()motor_forward لتشغيل المروحة مع اتجاه عقارب الساعة. ثم نقوم باستخدام الدالة (delay(3000 لإضافة تأخير زمني مدته 3 ثوان تظل المروحة خلاله تدور في نفس الاتجاه. ثم يتم استخدام الدالة ()motor_stop لإيقاف المروحة عن العمل لمدة 3 ثوان. ثم بإستدعاء الدالة ()motor_reverse نقوم بعكس اتجاه الحركة للمروحة. يتم تكرار هذه العملية حتى يتم فصل التيار.
void loop() {
motor_forward(); // move forward/clockwise
delay(3000); // keep rotating cw for 3 seconds
motor_stop(); // stop rotating
delay(3000); // stand still for 3 seconds
motor_reverse(); // reverse the rotation direction/ccw
delay(3000); // keep rotating ccw for 3 seconds
motor_stop(); // stop rotating
delay(3000); // stand still for 3 seconds
}
دالة ()motor_forward تقوم بتشغيل المروحة مع اتجاه عقارب الساعة. فهي تقوم بجعل أحد الأطراف HIGH والطرف الأخر LOW فتدور المروحة في هذا الإتجاه.
void motor_forward(void) // the function that will cause the motor to rotate cw
{
digitalWrite(MOTOR_IN1, HIGH);
digitalWrite(MOTOR_IN2, LOW);
}
تعمل الدالة ()motor_reverse بشكل مشابه للدالة السابقة motor_forward ، ولكن تعكس المخرجات على الأطراف فالطرف الذي تم إخراج قيمة HIGH عليه يتم جعله LOW والطرف الأخر HIGH . فينتج دوران باتجاه معاكس لإتجاه عقارب الساعة.
void motor_reverse(void) // the function that will cause the motor to rotate ccw
{
digitalWrite(MOTOR_IN1, LOW);
digitalWrite(MOTOR_IN2, HIGH);
}
تقوم الدالة motor_stop() بإيقاف المروحة تماما عن الحركة، عن طريق جعل كلا الطرفان LOW فلا يصل تيار إلى المروحة فتتوقف.
void motor_stop(void) // the function that will cause the motor to stop rotating
{
digitalWrite(MOTOR_IN1, LOW);
digitalWrite(MOTOR_IN2, LOW);
}