من أشهر المسابقات في عالم الروبوت برمجة روبوت يتتبع المسار ، سنقوم في هذا الدرس بتعلم كيفية برمجة روبوت تتبع المسار بدقة عالية.
الأدوات المطلوبة

أو

مستشعر تتبع المسار Line Follower
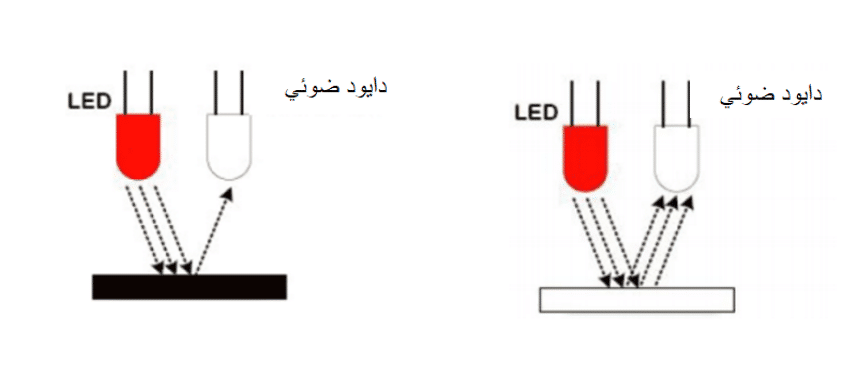
تتكون وحدة تتبع المسار من مستشعرين كل مستشعر يتكون من مصدر للأشعة تحت حمراء (LED) ومستقبل لهذه الأشعة
فكرة عمل مستشعر تتبع المسار تقوم على إطلاق أشعة تحت حمراء ورصد انعكاسها
عند سير الروبوت على الأسطح البيضاء فإن معظم الأشعة تنعكس من على السطح ويتم رصدها
أما عند سير الروبوت على الأسطح السوداء فإن اللون الأسود يمتص معظم الأشعة فلا ينعكس إلا مقدار بسيط منها إلى المستشعر
الأمر البرمجي لقراءة وحدة تتبع المسار
يعطي قيم بين 0 – 3 بناء على الحالات التالية
| الحالات | قيمة القراءة | المستشعر الأيمن | المستشعر الأيسر |
| كلا المستشعرين على اللون الأسود | 0 | ||
| المستشعر الأيسر فقط على اللون الأسود | 1 | ||
| المستشعر الأيمن فقط على اللون الأسود | 2 | ||
| كلا المستشعرين على اللون الأبيض | 3 |
الكود البرمجي
لبرمجة روبوت mBot نستخدم الأمر البرمجي لكتابة الكود على لوحة mCore
نستخدم الجملة الشرطية if.. then.. else
بحيث إذا كان مستشعر تتبع المسار على اللون الأسود (أي القيمة تساوي 0 ) يتحرك الروبوت للأمام بسرعة تساوي 100، وإذا كانت المستشعر الأيمن على الخط الأسود والمستشعر الأيسر على الخط الأبيض يتحرك الروبوت إلى اليمين، والعكس… .

للمزيد من المعلومات حول الكود يمكنك مراجعة درس جولة حول الأوامر البرمجية.
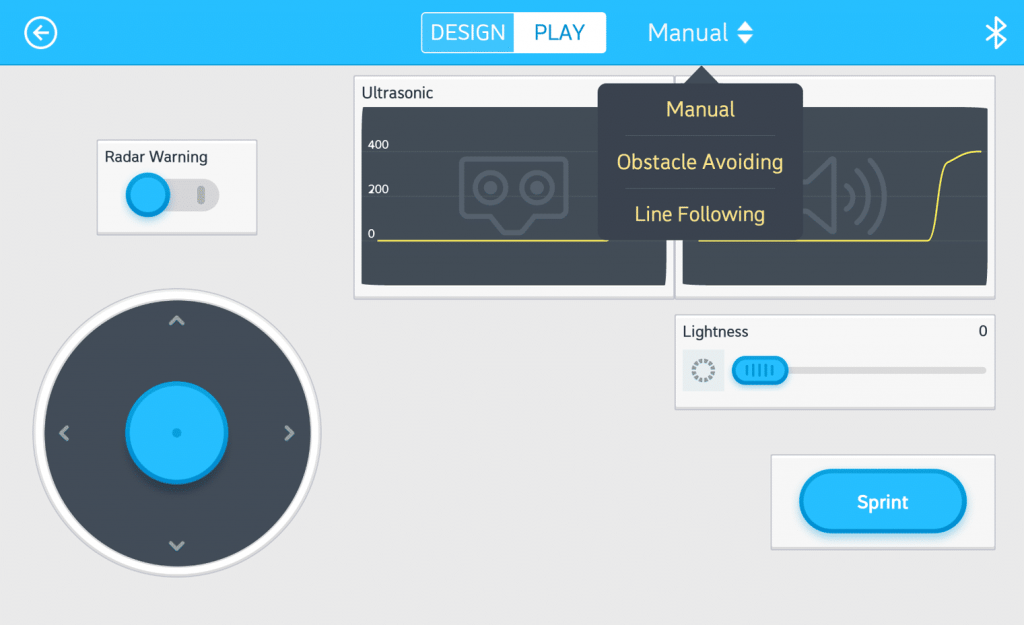
استخدام التطبيق
يمكن كذلك استخدام روبوت Ranger كروبوت متتبع للمسار عبر تطبيق MakeBlock
بعد فتح التتطبيق وربطه بالروبوت قم باختيار Ranger ثم Line following