في هذا المشروع سنقوم بعمل روبوت يتحرك متتبعا الأجسام القريبة منه ، حيث يتحرك للأمام ويتتبع الجسم إذا كان قريبا بمسافة معينة بينما يتحرك للخلف إذا أصبح الجسم قريبا جدًا ليتفادى الاصطدام
تعتمد فكرة الروبوت على أساس قياس المسافة باستخدام مستشعر الموجات فوق الصوتية بين الروبوت والجسم الذي أمامه ومن ثم التحرك وفق هذه المسافة.
الأدوات المطلوبة:

مستشعر الموجات فوق الصوتية (Ultrasonic Sensor)
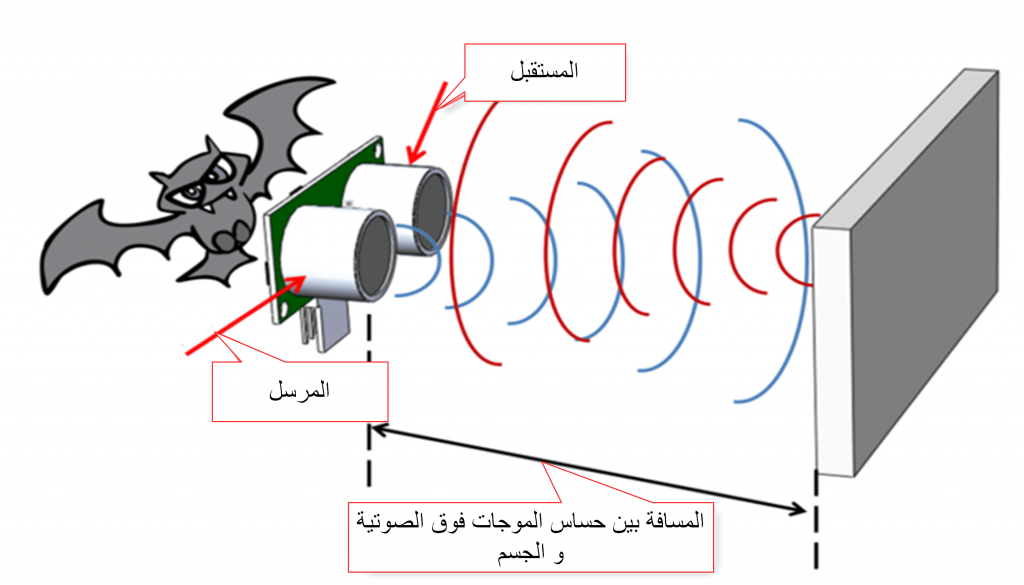
يقوم مستشعر الموجات فوق الصوتية بقياس المسافة حيث يقوم باطلاق موجات صوتية عالية التردد لا يمكن للأذن البشرية سماعها وعند اصطدام هذه الموجات بجسم ما ترتد على شكل صدى Echo ،عند ارتداد هذه الموجات يتم حساب الزمن الذي استغرقته للعودة إلى المستشعر وحساب المسافة.
يعتمد الخفاش لتحديد مساره على نفس المبدأ فإنه يقوم بإرسال موجات فوق صوتية وعند اصطدامها بالأشجار والمباني ترتد إليه ويتمكن من تغيير اتجاه طيرانه دون الحاجة إلى حاسة الإبصار.
برمجة الروبوت
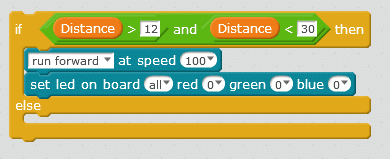
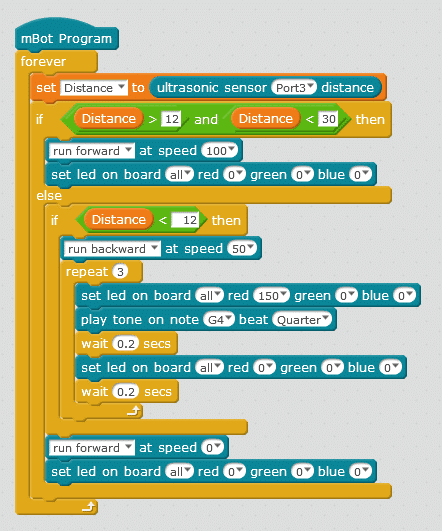
باستخدام الأمر البرمجي if else
إذا كانت المسافة أكبر من 12 سم أو أقل من 30 سم
يتحرك الروبوت للأمام بسرعة 100
وتبقى إضاءة LED مطفأة
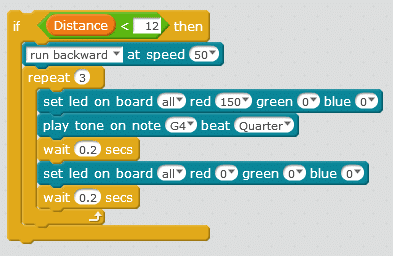
قمنا باختيار الأمر البرمجي الذي يتحكم بإضاءة LED لإصدار وميض ضوئي
قمنا باختيارشدة إضاءة اللون الأحمر 150 ثم أضفنا أمر التأخير الزمني wait لجعل الإضاءة تفتح وتغلق كل 0.2ثانية
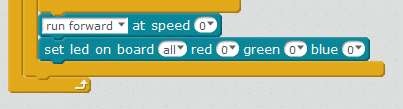
الكود البرمجي:
لمعلومات أكثر حول الأوامر البرمجية الأخرى يمكنك مراجعة درس جولة حول الأامر البرمجية.