فى البداية نقوم بفتح الـ Terminal الخاص ب الراسبيري باي وكتابة الأوامر التالية أو نقوم بفتح نافذه الـ SSH الخاصة بها من جهاز آخر مربوط معها علي نفس الشبكة كما تم شرحه في الدرس الخامس.
الأساس في هذا الكود هو المعادلة الحسابية التي يعمل عليها الحساس حيث أن السرعة التي يتحرك بها أي جسم تساوي المسافة التي تحركها مقسومة على الزمن الذي احتاجه لقطع هذه المسافة.
ومنها نحصل على معادلة المسافة والتى تقسم على 2 وذلك حيث أن الصوت المرسل من حساس الـ Ultrasonic يتحرك مرتين مره ذهاباً حتى يصطدم بالجسم الذي أمامه ويعود مرة أخرى للحساس.

فى البداية نقوم بفتح ملف بايثون ونسميه ultrasonic.py
sudo nano ultrasonic.py
ثم نقوم بكتابة الكود التالي بداخله.
import RPi.GPIO as GPIO #Import GPIO library
import time #Import time library
GPIO.setmode(GPIO.BCM) #Set GPIO pin numbering
TRIG = 4 #Associate pin 4 to TRIG
ECHO = 17 #Associate pin 17 to ECHO
print "Distance measurement in progress"
GPIO.setup(TRIG,GPIO.OUT) #Set pin as GPIO out
GPIO.setup(ECHO,GPIO.IN) #Set pin as GPIO in
while True:
GPIO.output(TRIG, False) #Set TRIG as LOW
print "Waitng For Sensor To Settle"
time.sleep(2) #Delay of 2 seconds
GPIO.output(TRIG, True) #Set TRIG as HIGH
time.sleep(0.00001) #Delay of 0.00001 seconds
GPIO.output(TRIG, False) #Set TRIG as LOW
while GPIO.input(ECHO)==0: #Check whether the ECHO is LOW
pulse_start = time.time() #Saves the last known time of LOW pulse
while GPIO.input(ECHO)==1: #Check whether the ECHO is HIGH
pulse_end = time.time() #Saves the last known time of HIGH pulse
pulse_duration = pulse_end - pulse_start #Get pulse duration to a variable
distance = pulse_duration * 17150 #Multiply pulse duration by 17150 to get distance
distance = round(distance, 2) #Round to two decimal points
if distance > 2 and distance < 400: #Check whether the distance is within range
print "Distance:",distance,"cm" #Print distance
print "Out Of Range" #display out of range
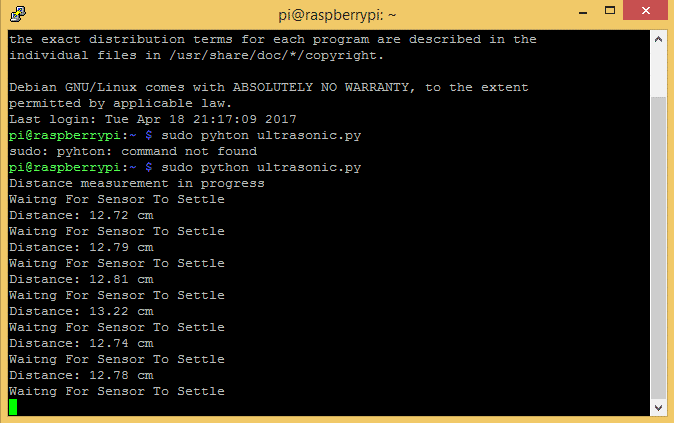
ثم نقوم بتشغل البرنامج عن طريق الأمر التالي.
sudo python ultrasonic.py
نلاحظ أن البرنامج يعمل ويقوم بعرض المسافة بين حساس الـ ultrasonic والكائن الذى أمام، قم بتغيير المسافة بين الحساس والكائن الذى أمامة ستلاحظ أن المسافة تتغير بالفعل.
أما عن شرح الكود الذي استخدمناه فهو في غاية السهولة حيث يتم إرسال نبضة للرجل Trig مع الأخذ فى الإعتبار مقدار الوقت بين high و الـ low وهو 10 ميكرو ثانية كالتالي.
GPIO.output(TRIG, True) #Set TRIG as HIGH time.sleep(0.00001) #Delay of 0.00001 seconds GPIO.output(TRIG, False) #Set TRIG as LOW
يقوم الحساس بالانتظار حتى تأتي النبضة وتستقبل من خلال الرجل echo فبمجرد إرسال النبضة يقوم بحساب بداية الوقت ثم بمجرد وصول النبضة للحساس يقوم بحساب نهاية الوقت ثم بطرحهم من بعضهم يحصل على الوقت المستغرق لترسل النبضة ثم تستقبل.
while GPIO.input(ECHO)==0: #Check whether the ECHO is LOW pulse_start = time.time() #Saves the last known time of LOW pulse while GPIO.input(ECHO)==1: #Check whether the ECHO is HIGH pulse_end = time.time() #Saves the last known time of HIGH pulse pulse_duration = pulse_end - pulse_start #Get pulse duration to a variable
بمعلومية سرعة الصوت فى الهواء والتى تساوي 343 متر فى الثانية أي تساوي 34300 سنتى متر في الثانية، نقوم بالتعويض في المعادلة لتصبح الصيغة النهاية هي حاصل ضرب الزمن فى 17150، ثم نقوم بالتقريب لأقرب رقمين عشريين.
distance = pulse_duration * 17150 #Multiply pulse duration by 17150 to get distance distance = round(distance, 2) #Round to two decimal points
مع الأخذ في الأعتبار بأن هذا الحساس لا يستطيع الأحساس بالمسافات الأقل من 2 سنتى متر ولا أكثر من 4 أمتار، لذلك يتم إضافة الدالة الشرطية التالية.
if distance > 2 and distance < 400: #Check whether the distance is within range print "Distance:",distance,"cm" #Print distance else: print "Out Of Range" #display out of range