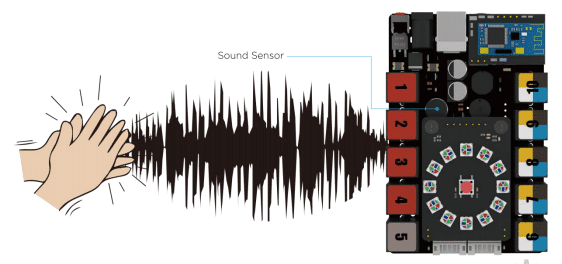
Sound Sensor مستشعر الصوت
يمكن أن نقول بأن مستشعر الصوت هو عبارة عن مايكروفون صغير يقوم بتحويل الصوت إلى إشارة كهربائية، ويعطي قيمة تتراوح بين 0-1023. تختلف القيمة باختلاف المحيط الذي نقوم بتشغيل الروبوت فيه
لا يستطيع مستشعر الصوت التمييز بين الكلمات لكن يستطيع التمييز بين الأصوات المرتفعة والمنخفضة التي تقع في المدى الخاص به. كلما كانت شدة الصوت أعلى كانت الإشارة الكهربائية أكثر
تحديد مدى قراءة المستشعر
قبل أن نقوم بكتابة البرنامج نحتاج أولا إلى عمل اختبار صغير لمعرفة المدى الذي يقرأ فيه المستشعر، والقراءات التي يعطيها عند التصفيق أو الكلام أو أي أصوات أخرى.
نقوم أولا بتوصيل الروبوت إلى الحاسوب عن طريق الكيبل.
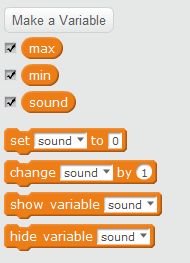
قم بانشاء متغير Sound
اختيار الأمر say وتعيينه على مستشعر الضوء
ووضع الأمر داخل حلقة forever
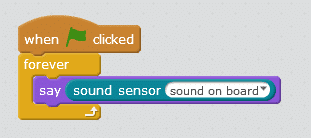
ستظهر قراءة المستشعر على الشاشة
نلاحظ أن القيمة تتغير بسرعة كبيرة جدا وبهذا يصعب تحديد أعلى قيمة وأقل قيمة، لذا سنضيف متغيرين آخرين
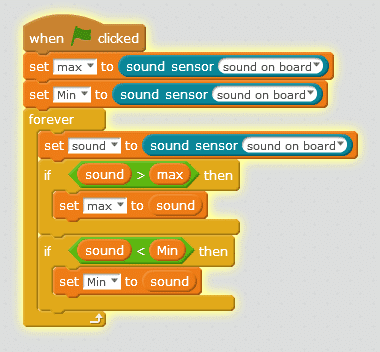
Max ليمثل أعلى قيمة، و Min ليمثل أقل قيمة
سنقوم بتعيين المتغيرين على قراءة مستشعر الصوت
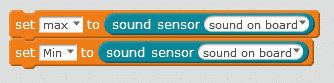
ونقوم كذلك بتعيين المتغير Sound لقراءة مستشعر الصوت
في البداية ستكون Max = Min
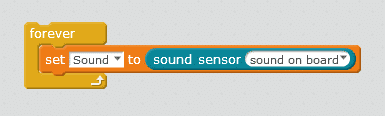
داخل حلقة forever ستتغير قيمة المتغير Sound
ولتحديد أعلى وأقل قيمة نستخدم if ..then
بحيث إذا كانت قيمة sound أكبر من قيمة max
يتم إعادة تعيين قيمة max إلى هذه القيمة كأعلى قيمة
ويتم إعادة تعيين قيمة min إلى أقل قيمة تمت قراءتها في المتغير Sound