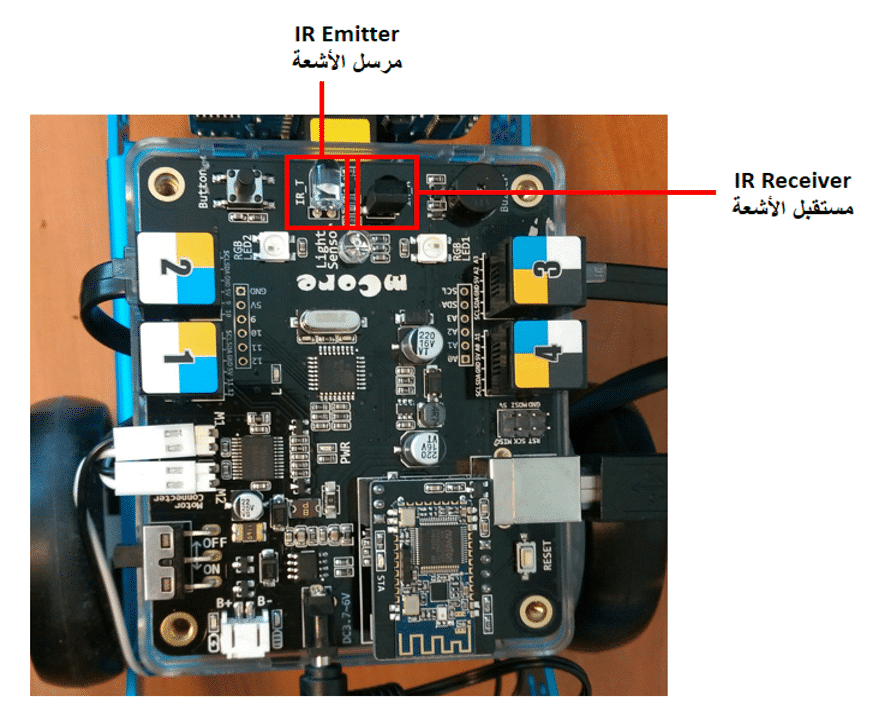
تحتوي لوحة التحكم mCore على LED (مُرسل IR Emitter) تقوم بإرسال أشعة تحت حمراء تحمل المعلومات المراد إرسالها
وتحتوى اللوحة كذلك على عنصر مستقبل لهذه الأشعة (IR Receiver).
سنقوم في هذا الدرس بعمل اتصال لاسلكي بين لوحتين mCore بحيث يقوم الروبوت الأول بالتوقف عند الحواجز وإرسال أمر إلى الروبوت الآخر بالتوقف أيضًا.
الأدوات المطلوبة:

mBot Kit (عدد 2)
الاتصال عبر الأشعة تحت الحمراء IR Communication
يعتبر الاتصال عبر الأشعة تحت الحمراء من التقنيات الشائعة للتواصل بين الأجهزة مثل المستخدمة في الريموت كونترول للتحكم بقنوات التلفاز ، تحمل الأشعة تحت الحمراء والتي لا يمكن رؤيتها بالعين المجردة المعلومات المراد إرسالها المستقبل.
تحتوي مجموعة الأوامر البرمجية لروبوت mBot على أمرين متعلقين بالاتصال اللاسلكي
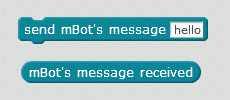
الروبوت المُرسل
يتم تعيين أحد الروبوتات كمُرسل
وكتابة الرسالة داخل الأمر البرمجي send mBot’s message
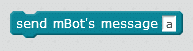
يكفي أن تحتوي الرسالة على أحد الأحرف ويجب أن تكون قيمة ثابتة حيث لا يمكن للروبوت إرسال قيمة متغيرة (مثل قراءة مستشعر) كما لا يمكن للروبوت المستقبل استخدام القيم المتغيرة لآداء وظائف أخرى
في هذا المشروع سنقوم ببرمجة الروبوت الأول لتفادي الحواجز بحيث عندما يقترب من حاجز ما يتوقف ويرسل رسالة إلى الروبوت الآخر بالتوقف كذلك.
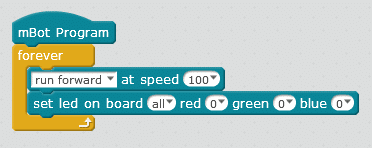
بدايةً نقوم بوضع أمر الحركة للأمام داخل حلقة forever وإضاءة LED على وضع الإطفاء
سيتحرك الروبوت للأمام فور تشغيله
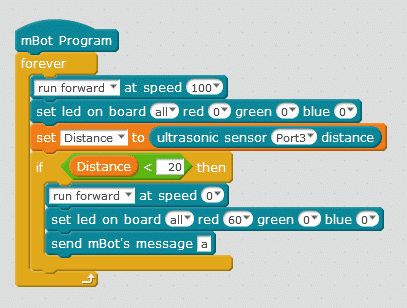
نقوم بإنشاء متغير Distance وتعيينه لقؤاءة مستشعر الموجات فوق الصوتية
نقوم بإضافة شرط (if then)لتحديد المسافة التي يتوقف عندها الروبوت إذا واجه أحد الحواجز
إذا كانت المسافة بين الروبوت والحاجز أقل من 20 يتوقف الروبوت (السرعة صفر) ويرسل رسالة عبر الأشعة تحت الحمراء IR
ويعطي إضاءة LED باللون الأحمر لتتم معرفة أن الروبوت أرسل رسالة
الكود البرمجي للروبوت المُرسل
يجب وضع الأوامر البرمجية المتعلقة بالاتصال اللاسلكي داخل loop ليتم إرسال واستقبال الرسائل في نفس الوقت
ملاحظة: إذا قمت بوضع الأمر البرمجي للإرسال داخل حلقة Repeat لإرسال رسائل متتالية سيتوقف الروبوت الآخر عن الاستجابة بعد فترة ، لتفادي ذلك قم بإضافة تأخير زمني بين إرسال الرسائل باستخدام الأمر wait
الروبوت المستقبل
تتغير وظيفة الروبوت المُستقبل عند استلام الرسالة التي يرسلها الروبوت الأول
يجب كتابة الرسالة داخل علامتي تنصيص double quote ليعمل البرنامج بشكل صحيح
سنستخدم الجملة الشرطية if ونضع بداخلها مجموعة الأوامر التي يقوم بها الروبوت المُستقبل عند استلام الرسالة
أي إذا استلم الروبوت الرسالة من الروبوت الأول (المُرسل) سيتم تنفيذ الأوامر البرمجية المبنية على هذه الرسالة
في هذا المشروع سنقوم ببرمجة الروبوت المُستقبِل على أن يتحرك للأمام إلى أن يستقبل رسالة من الروبوت الأول فيتوقف ويعطي وميض ضوئي أخضر
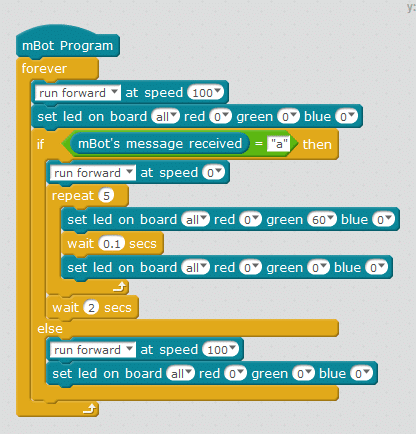
برمجة الروبوت المستقبِل
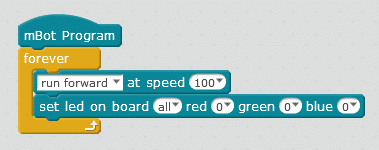
بدايةً نقوم بوضع أمر الحركة للأمام داخل حلقة forever وإضاءة LED على وضع الإطفاء
سيتحرك الروبوت للأمام فور تشغيله
نقوم بإضافة شرط if else
بحيث إذا استقبل الروبوت الرسالة من الروبوت الأول (a) يقوم بتنفيذ الأوامر التالية في الكود
وهي التوقف عن الحركة باستخدام أمر الحركة واختيار السرعة 0
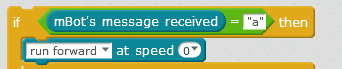
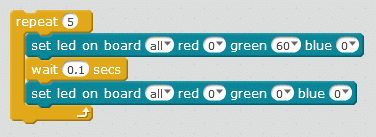
لإعطاء وميض ضوئي أخضر نقوم بوضع أمر إضاءة LED
واختيارقيمة معينة للون الأخضر
ثم وضع نفس الأمر على وضع الإطفاء (جميع الألوان على القيمة 0)
ووضع أمر التأخير الزمني wait بينهم لنتمكن من ملاحظة الوميض
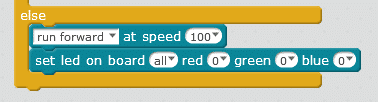
بعد الأمر else أي إذا لم يستقبل الروبوت رسالة من الروبوت الأول
يعاود الحركة ويطفئ إضاءة LED
الكود البرمجي للروبوت المستقبِل
لمعلومات أكثر حول الأوامر البرمجية الأخرى التي تم استخدامها في الكود راجع درس جولة حول الأوامر البرمجية.