تحتوي مجموعة الأوامر البرمجية لروبوت mBot على أمرين متعلقين بالاتصال اللاسلكي
الروبوت المُرسل
يتم تعيين أحد الروبوتات كمُرسل
وكتابة الرسالة داخل الأمر البرمجي send mBot’s message
يكفي أن تحتوي الرسالة على أحد الأحرف ويجب أن تكون قيمة ثابتة حيث لا يمكن للروبوت إرسال قيمة متغيرة (مثل قراءة مستشعر) كما لا يمكن للروبوت المستقبل استخدام القيم المتغيرة لآداء وظائف أخرى
في هذا المشروع سنقوم ببرمجة الروبوت الأول لتفادي الحواجز بحيث عندما يقترب من حاجز ما يتوقف ويرسل رسالة إلى الروبوت الآخر بالتوقف كذلك.
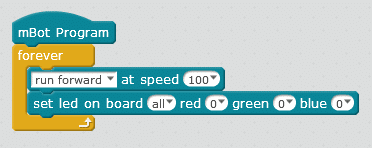
بدايةً نقوم بوضع أمر الحركة للأمام داخل حلقة forever وإضاءة LED على وضع الإطفاء
سيتحرك الروبوت للأمام فور تشغيله
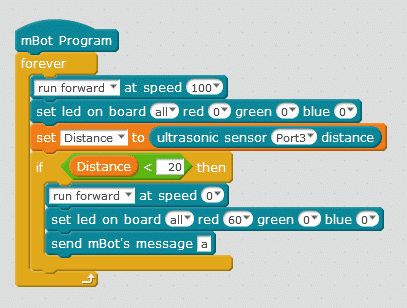
نقوم بإنشاء متغير Distance وتعيينه لقؤاءة مستشعر الموجات فوق الصوتية
نقوم بإضافة شرط (if then)لتحديد المسافة التي يتوقف عندها الروبوت إذا واجه أحد الحواجز
إذا كانت المسافة بين الروبوت والحاجز أقل من 20 يتوقف الروبوت (السرعة صفر) ويرسل رسالة عبر الأشعة تحت الحمراء IR
ويعطي إضاءة LED باللون الأحمر لتتم معرفة أن الروبوت أرسل رسالة
الكود البرمجي للروبوت المُرسل
يجب وضع الأوامر البرمجية المتعلقة بالاتصال اللاسلكي داخل loop ليتم إرسال واستقبال الرسائل في نفس الوقت
ملاحظة: إذا قمت بوضع الأمر البرمجي للإرسال داخل حلقة Repeat لإرسال رسائل متتالية سيتوقف الروبوت الآخر عن الاستجابة بعد فترة ، لتفادي ذلك قم بإضافة تأخير زمني بين إرسال الرسائل باستخدام الأمر wait