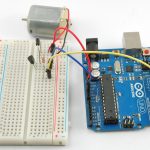
الكود البرمجي للموجه
الكود البرمجي لتوجيه محرك السيرفو عبر المقبض أسهل من الكود السابق
#include <Servo.h>
int potPin = 0;
int servoPin = 9;
Servo servo;
void setup()
{
servo.attach(servoPin);
}
void loop()
{
int reading = analogRead(potPin); // 0 to 1023
int angle = reading / 6; // 0 to 180
servo.write(angle);
}
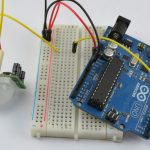
هنالك متغير آخر يدعى ‘potPin’ .
لتحديد موضع السيرفو ، علينا تحويل القراءة التناظرية ‘analogRead’ من المنفذ A0. هذا سيعطينا قيمة مابين 0 و 1023 . وبما أن السيرفو يستطيع التحرك حتى زاوية 180 درجة كحد أقصى لذا علينا خفض الحد الأقصى من القيمة المقروءة. وذلك عبر قسمة الرقم على 6 وذلك سيعطينا قيمة مابين 0 و 170 والتي ستكون مناسبة.