الكود البرمجي
في هذا المشروع، سيدور المحرك في الإتجاه الأول لمدة ثلاث ثوان، ثم يتوقف لمدة ثلاث ثوان. ثم يدور المحرك بالإتجاه المعاكس لمدرة ثلاث ثوان، ثم يتوقف لمدة ثلاث ثوان أخرى. وهكذا حتى يتم فصل التيار الكهربائي.
قم بتحميل الكود التالي إلى الأردوينو :
#define MOTOR_IN1 12
#define MOTOR_IN2 13
void motor_forward(void); // a function that will be called to rotate it clockwise
void motor_reverse(void); // a function that will be called to totate it counter-clockwise
void motor_stop(void); // a function that will be called to stop the rotation
void setup() {
pinMode(MOTOR_IN1, OUTPUT); // set the first pin of the relay as output
pinMode(MOTOR_IN2, OUTPUT); // set the 2nd pin of the relay as output
}
void loop() {
motor_forward(); // move forward/clockwise
delay(3000); // keep rotating cw for 3 seconds
motor_stop(); // stop rotating
delay(3000); // stand still for 3 seconds
motor_reverse(); // reverse the rotation direction/ccw
delay(3000); // keep rotating ccw for 3 seconds
motor_stop(); // stop rotating
delay(3000); // stand still for 3 seconds
}
void motor_forward(void) // the function that will cause the motor to rotate cw
{
digitalWrite(MOTOR_IN1, HIGH);
digitalWrite(MOTOR_IN2, LOW);
}
void motor_reverse(void) // the function that will cause the motor to rotate ccw
{
digitalWrite(MOTOR_IN1, LOW);
digitalWrite(MOTOR_IN2, HIGH);
}
void motor_stop(void) // the function that will cause the motor to stop rotating
{
digitalWrite(MOTOR_IN1, LOW);
digitalWrite(MOTOR_IN2, LOW);
}
شرح الكود :
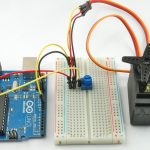
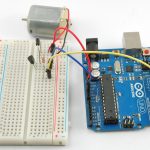
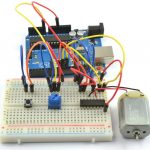
قمنا سابقا بتوصيل طرفى كلا من الترانزستور (IN1,IN2) بمنفذ 12 و 13 للأردوينو . لذلك قمنا بتسمية كلا المنفذين للأردونو تبعا لما تم توصيله بالدارة.
#define MOTOR_IN1 12 #define MOTOR_IN2 13
نقوم بتعرف المتغيرات IN1 و IN2 ( أطراف الـ H-bridge الموصله بالاردوينو) كمخرج.
void setup() {
pinMode(MOTOR_IN1, OUTPUT); // set the first pin of the relay as output
pinMode(MOTOR_IN2, OUTPUT); // set the 2nd pin of the relay as output
}
في دالة ()loop، نقوم أولا بإستدعاء الدالة ()motor_forward . تقوم هذه الدالة بتشغيل المحرك مع اتجاه عقارب الساعة لمدة 3 ثوان ((delay(3000) . ثم نقوم باستخدام الدالة ()motor_stop ، لإيقاف المحرك عن العمل لمدة 3 ثوان. ثم يتم عكس اتجاه حركة المحرك باستخدام الدالة ()motor_reverse لمدة 3 ثوان. ومن ثم يعود ليكرر نفس هذه المهمة من البداية مرة أخرى.
void loop() {
motor_forward(); // move forward/clockwise
delay(3000); // keep rotating cw for 3 seconds
motor_stop(); // stop rotating
delay(3000); // stand still for 3 seconds
motor_reverse(); // reverse the rotation direction/ccw
delay(3000); // keep rotating ccw for 3 seconds
motor_stop(); // stop rotating
delay(3000); // stand still for 3 seconds
}
الدلة ()motor_forward، تقوم بتحريك المحرك بإتجاه عقارب الساعة. تتم هذه العملية عن طريق جعل قيمة IN1 للمرحل HIGH والطرف الآخر LOW .
void motor_forward(void) // the function that will cause the motor to rotate cw
{
digitalWrite(MOTOR_IN1, HIGH);
digitalWrite(MOTOR_IN2, LOW);
}
تعمل هذه الدالة ()motor_reverse بشكل مشابه للدالة السابقة، إلا أنها تعكس اتجاه دوران المحرك. تتم هذه العملية عن طريق جعل قيمة IN2 للمرحل HIGH، وIN1 قيمة LOW .
void motor_reverse(void) // the function that will cause the motor to rotate ccw
{
digitalWrite(MOTOR_IN1, LOW);
digitalWrite(MOTOR_IN2, HIGH);
}
دالة ()motor_stop، تقوم بإيقاف المحرك تماما عن الحركة، عن طريق جعل قيمة كلا الطرفين LOW فلا يصل التيار للمحرك فيتوقف.
void motor_stop(void) // the function that will cause the motor to stop rotating
{
digitalWrite(MOTOR_IN1, LOW);
digitalWrite(MOTOR_IN2, LOW);
}