في هذا الدرس ستتعلم كيف تصنع نظام طبي لقياس نسبة الأكسجين في الدم، وكذلك لقياس ...
Arduino| اردوينو إنترنت الأشياء | IOT
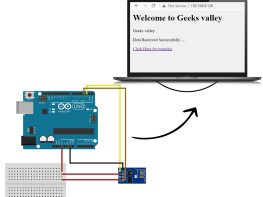
في هذا الدرس سنتعلم كيفية إنشاء خادم ويب باستخدام الاردوينو ووحدة ESP8266.
في هذا الدرس سنصنع نظام تحديد المواقع GPS باستخدام الاردوينو ووحدة اتصال وارسال ...
اصنع ساعة لعرض الوقت بالكلمات العربية باستخدام الاردوينو ووحدة RTC
Arduino| اردوينو
في هذا الدرس سنتعلم طريقة برمجة محول الأنظمة العددية باستخدام الاردوينو ولوحة ...
في هذا الدرس سنقوم ببناء جهاز ألعاب فيديو محمول وعلى الجهاز سنقوم ببرمجة لعبة ...
في هذا الدرس ستتعرف على كيفية برمجة لوحة الاردوينو ووحدة ECG.
يمكن صنع جهاز راديو من خلال برمجة وحدة وحدة (TEA5767 FM) مع الأردوينو
في هذا الدرس سنتعلم برمجة نظام يقيس مستوى مهاراتك في الرياضيات من خلال سلسلة ...
في هذا الدرس سنستخدم لوحة الاردوينو وعصا التحكم والشاشة الكرستالية؛ ليساعدنا ...
تتطلب بعض المشاريع الإلكترونية، توصيل القطع لاسلكياً معاَ سواء لإرسال البيانات ...
في هذا الدرس سنتعرف على وحدة المستقبل والمرسل اللاسلكي الترددي (RF 433Mhz)، والتحكم ...
يجب عليك تسجيل الدخول للمتابعة. دخول تسجيل عضوية