برمجة الروبوت
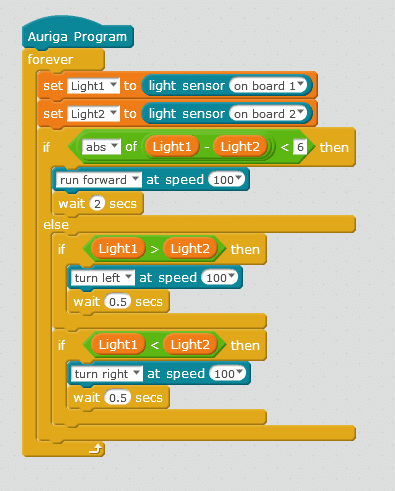
سنقوم في البداية بإنشاء متغيرين Light 1 وتعيينه لقراءة المستشعر الأيسر (كما هو مكتوب على اللوحة الرئيسية)
ومتغير Light2 وتعيينه لقراءة المستشعر الأيمن في اللوحة
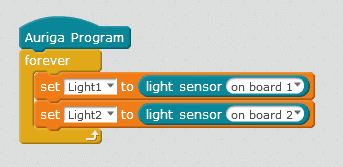
داخل حلقة Forever
سنستخدم ثلاث جمل شرطية if لتمثل لنا ثلاث حالات مختلفة
الأولى إذا تعرض المستشعرين لنفس شدة الضوء والحالتين الأخرى إذا كانت شدة الضوء على أحدهما أكبر من الآخر
الشرط الذي يمثل حالة أن تكون قراءة المستشعر الأول = الثاني
لكن بما أننا وجدنا اختلافا في قراءة المستشعرين تصل إلى 5 أرقام عن اختبارهما في الخطوة السابقة سنعيد كتابة الشرط كالتالي
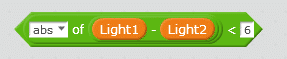
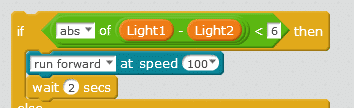
وهذا يعني أنه إذا كان الفرق بين قيمة المستشعر الأول والثاني أقل من 6 فسيتم اعتبار أنهما متساويان ويتحرك الروبوت للأمام
أضفنا abs القيمة المطلقة لتعطي ناتج الطرح قيمة موجبة دائمًا سواء كانت قيمة Light1 أكبر من Light2 أو العكس.
إذا لم يتحقق الشرط الأول أي إذا كان الفرق بين القراءتين 6 أو أكبر يتم تنفيذ الأوامر بعد else
حيث سنضيف الشروط المتعلقة بالحالتين الأخرى
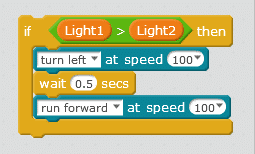
الحالة الثانية
إذا كانت قراءة المستشعر الأيسر Light1 أكبر من قراءة المستشعر الأيمن Light2
ينعطف الروبوت باتجاه اليسار أي باتجاه شدة الإضاءة الأعلى
الحالة الثالثة
إذا كانت قراءة المستشعر الأيسر Light2 أقل من قيمة المستشعر الأيمن Light1
ينعطف الروبوت لليمين أي باتجاه شدة الإضاءة الأعلى.
الكود البرمجي
لمزيد من المعلومات حول الأوامر البرمجية الأخرى قم بالرجوع لدرس جولة حولة الأوامر البرمجية