أولا، انت بحاجة إلى تفعيل بث فيديو مباشر عبر صفحة ويب. قم بتتبع خطوات درس بث فيديو مباشر عبر شبكة الإنترنت .
إنشاء واجهة التحكم :
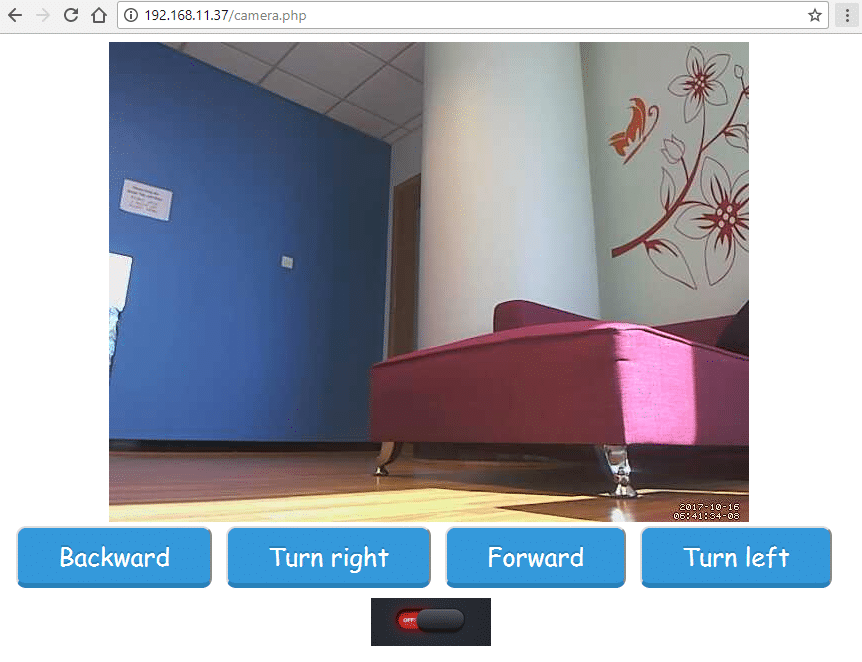
تتألف واجهة التحكم من فيديو الكاميرا التي تم تفعيله بالخطوة السابقة، واربع مفاتيح تحكم للسيطرة على محرك السيارة.
سيتم إنشاء واجهة الصفحة بإستخدام لغةHTML، و لتفاعلات الخادم يتم إنشاء صفحة PHP، و JAVAScript لإدارة التفاعل مع المستخدم و الرسوم المتحركة للصفحة. ويمكنك استخدام CSS لتخطيط و تنسيق الصفحة مثل الخلفية أو مفاتيح التحكم .
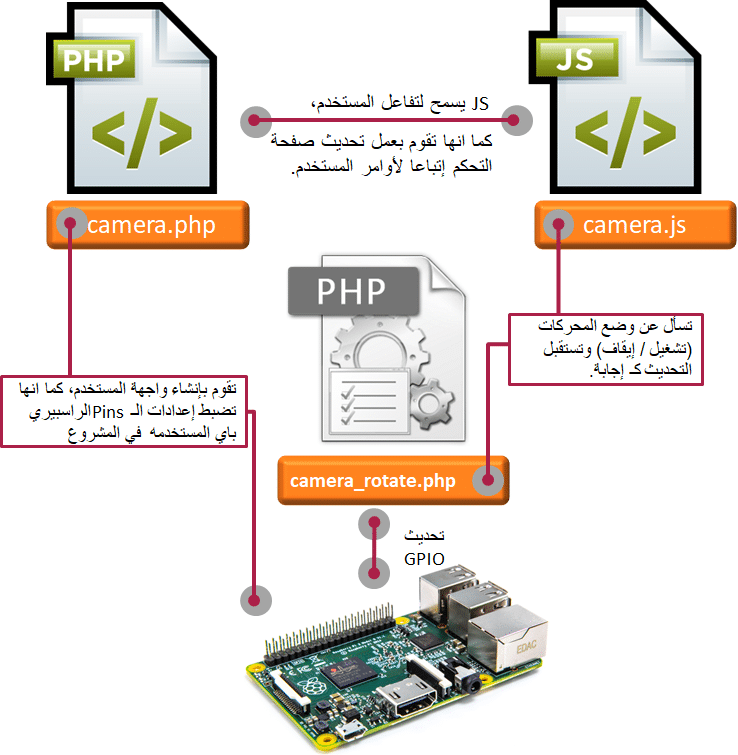
اولا نحن بحاجة لملف “camera.php” لإنشاء الواجهة ولتفاعل الخادم . هذه الصفحة هي الصفحة الرئيسية التي تحتوي على مفاتيح التحكم بالمحركات، كما تحتوي على بث الفيديو المباشر.
ملف Camera.php :
يتم استخدام لغة الـ HTML لتصميم واجهة المستخدم :
أولا : يتم إدراج فيديو البث عن طريق الأمر التالي، كما يتم تحديد الـ src URL (عنوان الويب ) الخاص بالبث المباشر
<img height="480" width = "640" src="http://YourIPAddress:8081" />
ثم نقوم بإدراج اربعة مفاتيح تحكم بإستخدام الأمر التالي :
<button id="myP" onmousedown="mouseDown(02)" onmouseup="mouseUp(02)">Backward</button> <button id="myP" onmousedown="mouseDown(03)" onmouseup="mouseUp(03)">Turn right</button> <button id="myP" onmousedown="mouseDown(37)" onmouseup="mouseUp(37)">Forward</button> <button id="myP" onmousedown="mouseDown(27)" onmouseup="mouseUp(27)">Turn left</button>
بعد ذلك، بإستخدام لغة الـ PHP نقوم بضبط إعدادات GPIO المستخدمة على الراسبيري باي كمخرج، وإعطاء الـ Pins المستخدمة القيم الإبتدائية :
system("gpio mode 0 out");
system("gpio write 0 0");
system("gpio mode 2 out");
system("gpio write 2 0");
system("gpio mode 3 out");
system("gpio write 3 0");
system("gpio mode 7 out");
system("gpio write 7 0");
لجعل هذه المفاتيح الأربعة تعمل مع المحركات (على سبيل المثال عند الضغط على مفتاح الرجوع للخلف يتم اشارات إلى المحركات من شأنها تحريك الروبوت للخلف)، لعمل ذلك يتم إنشاء ملفات أخرى :
– ملف camera.js يحتوي هذا الملف على الدالتين mouse_up و mouse_down للتحكم بمنافذ الراسبيري باي.
– ملف camera_rotate.php يتلقى المحتوى من camera.js، وبعد ذلك يتم تطبيق الإشارات على الـ GPIO المستخدمة في المشروع عن طريق إرسال إشارات إلى المحركات للتحكم بها إما 0v أو 5v.
يمكنك تنزيل ملفات صفحة الويب لهذا المشروع من هنا. يجب حفظ جميع الملفات في /var/www/html على الراسبيري باي.
الآن قم بالإنتقال إلى شبكة الإنترنت والدخول إلى YourRaspiIPAddress/camera.php ، ستتمكن من رؤية بث الكاميرا، وسيتحرك الروبوت عند الضغط على أحد المفاتيح.