في هذا الدرس سوف نشرح كيف نستخدم محرك سيرفو والتحكم به بالبايثون (Python).
يتم التحكم بمحرك السيرفو عن طريق النبضات الكهربائية من خلال التحكم بطول النبضة في الدورة ، وهذا يتطلب وقت دقيق إلى حدٍ ما ، الرازبيري باي تحتوي على أرجل تولد نبضات مباشرة من القطعة نفسها. (راجع الدرس الرابع)
القطع
لتطبيق الدرس تحتاج للقطع التالية:
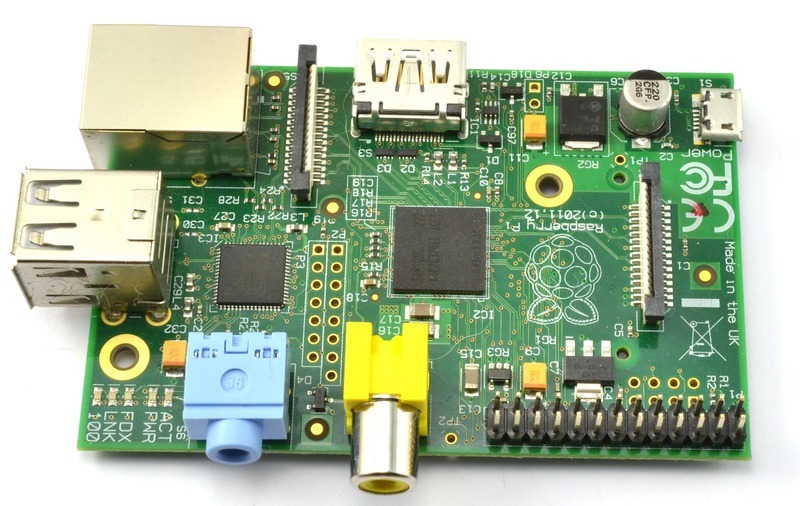
راسبيري باي
وصلة خارجية لتوصيل أرجل GPIO في لوحة الاختبار

أسلاك توصيل
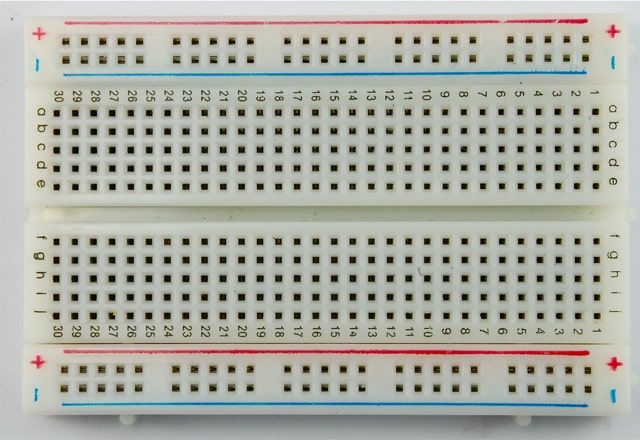
لوحة الاختبار
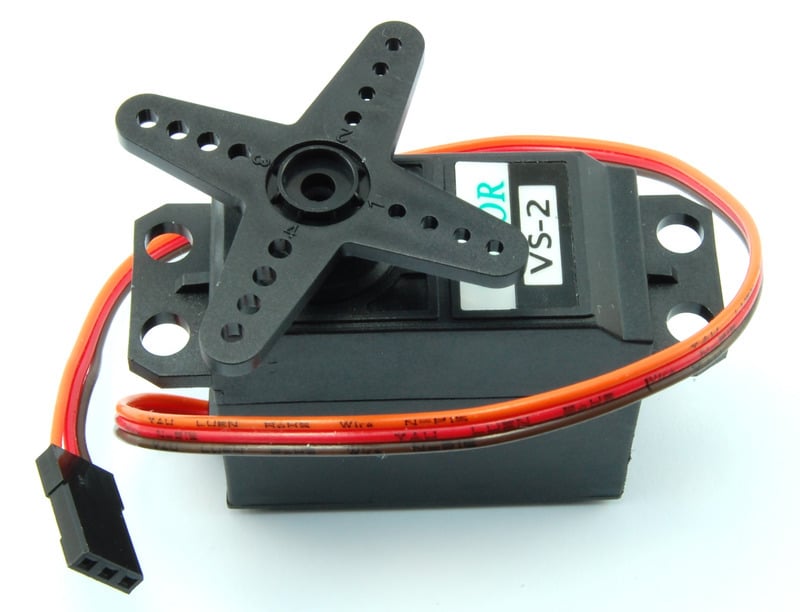
محرك سيرفو
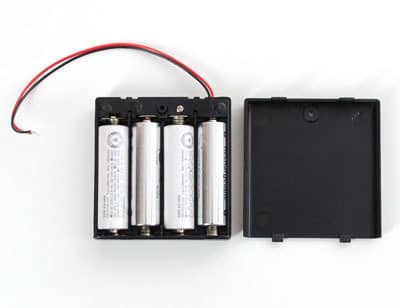
علبة بطاريات + 4 بطاريات AA
محركات السيرفو
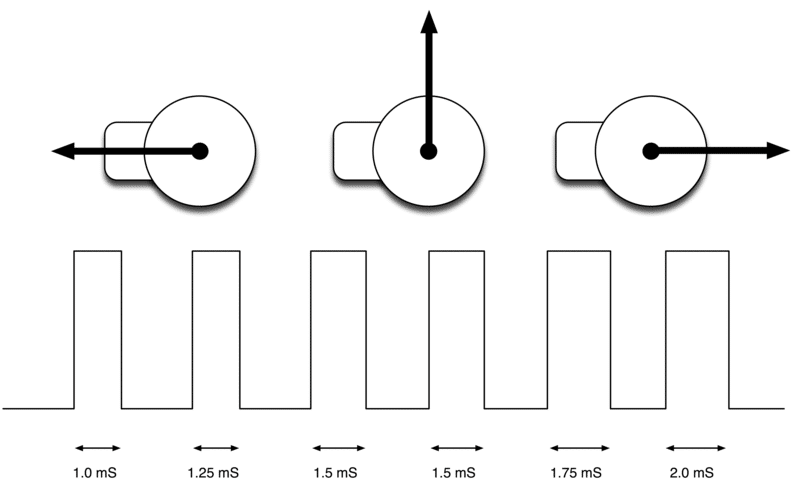
التحكم باتجاه حركة محرك السيرفو يكون عن طريق التحكم بطول النبضة أو ما يعرف بـ (Duty Cycle) في PWM ، المحرك يتوقع أن يستقبل نبضة كل 20 ملي ثانية أو كل 50Hz حيث إذا كان طول النبضة 1.5 ملي ثانية فإن المحرك سيتجه للمركز وزاويته 90 درجة ، وإذا قل عن 1.5 ملي ثانية سيتجه للزاوية 0 درجة ، وإذا زاد عن 1.5 سوف يتجه إلى الزاوية 180 درجة.
التحكم بالمحرك باستخدام مكتبة RPi.GPIO
أول خطوة هي تحديد الرجل التي ستستخدم مع PWM وذلك من خلال الدالة PWM كالتالي:
p = GPIO.PWM(18, 50)
في الحالة السابقة فإن رقم الرجل المراد تفعيل PWM هي 18 وترددها 50Hz والتي تعادل 20 ملي ثانية
لتشغيل أو البدء في إرسال النبضات نستخدم الدالة start:
p.start(dc)
dc هو قيمة (duty cycle) وهي عبارة عن نسبة مئوية وتحسب كالتالي:
dc = L/P
حيث L تساوي طول النبضة و P تساوي طول الدورة.
لتغيير قيمة dc نستخدم الدالة ChangeDutyCycle:
p.ChangeDutyCycle(dc)
لإيقاف إرسال النبضات نستخدم الدالة stop:
p.stop()
مثال عملي
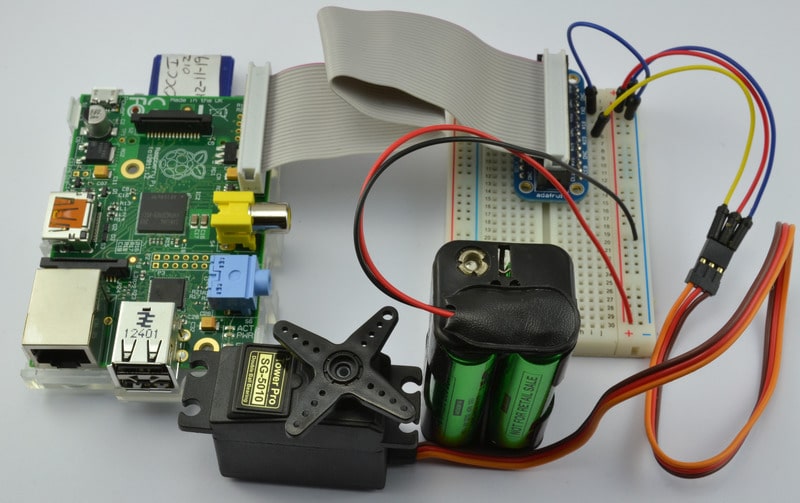
أولا التوصيل:
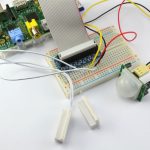
سنتبع التوصيل كما في الصورة التالية:
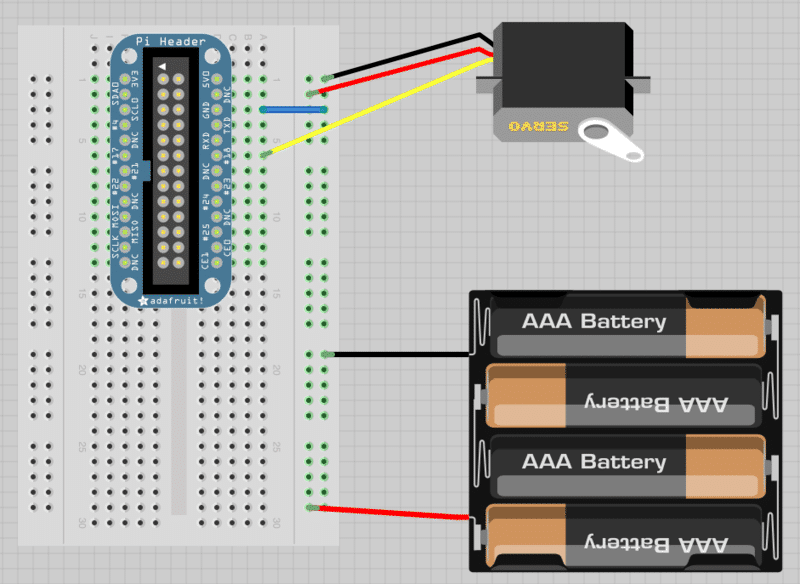
للتوضيح:
السلك الأصفر متصل مع الرجل رقم (GPIO 18)
والسلك الأسود من البطارية متصل مع السلك الأسود من المحرك ومع السلك الأزرق الذي بدوره متصل مع الرجل GND
والسلك الأحمر من البطارية متصل مع السلك الأحمر من المحرك
وبالتالي يكون التوصيل النهائي مشابه للصورة التالية:
ثانيًا الكود البرمجي:
البرنامج التالي سيتحكم بالمحرك من خلال تحريكه للزاوية 90 درجة وينتظر ثانية واحدة ، ثم يحركه إلى الزاوية 0 درجة وينتظر ثانية واحدة ، وفي الأخير يحركه إلى الزاوية 180 درجة ، ثم يستمر بتكرار نفس الخطوات حتى تتم مقاطعته.
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BOARD)
GPIO.setup(18, GPIO.OUT)
p = GPIO.PWM(18, 50)
p.start(7.5)
try:
while True:
p.ChangeDutyCycle(7.5) # turn towards 90 degree
time.sleep(1) # sleep 1 second
p.ChangeDutyCycle(2.5) # turn towards 0 degree
time.sleep(1) # sleep 1 second
p.ChangeDutyCycle(12.5) # turn towards 180 degree
time.sleep(1) # sleep 1 second
except KeyboardInterrupt:
p.stop()
GPIO.cleanup()
ملاحظة: dc تم حسابها كالتالي:
dc= (0.5/20) ×100= 2.5%
dc= (1.5/20) ×100= 7.5%
dc= (2.5/20) ×100= 12.5%