برمجة ذراع الروبوت
ينقسم التحكم بذراع الروبوت إلى قسمين : حركة الذراع للأعلى والأسفل وحركة المقبض للإمساك بالأشياء وإفلاتها
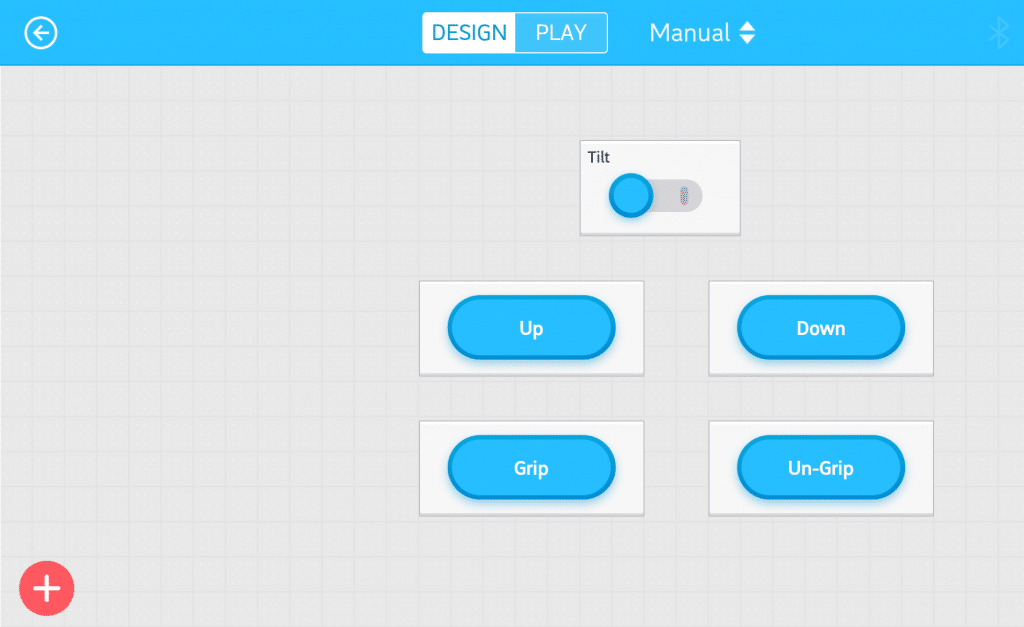
سنقوم بإضافة 4 أزرار تحكم
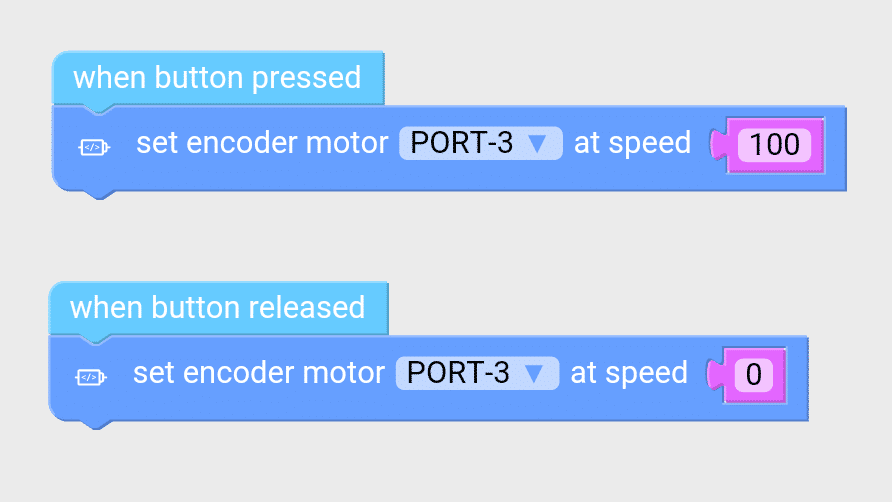
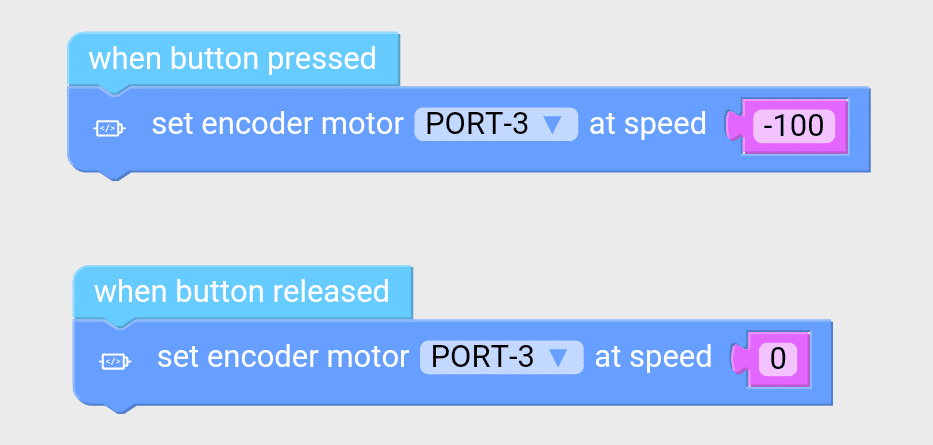
لتحرك الذراع للأعلى سوف نسمي الزر الأول Up بالنقر عليه واختيار علامة تعديل الاسم
عند ضغط الزر سنضيف الأمر البرمجي المتعلق بتحريك محرك التشفير encoder motor المسؤول عن تحريك الذراع واختيار رقم المنفذ الذي تم توصيله به
وعند ترك الزر نضع السرعة صفر للتوقف
لتحريك الذراع للأسفل سوف نسمي الزر الآخر Down
ونضيف نفس الكود البرمجي لمحرك التشفير لكن بوضع قيمة السرعة سالبة ( – ) لعكس اتجاه الحركة
برمجة القابض Gripper
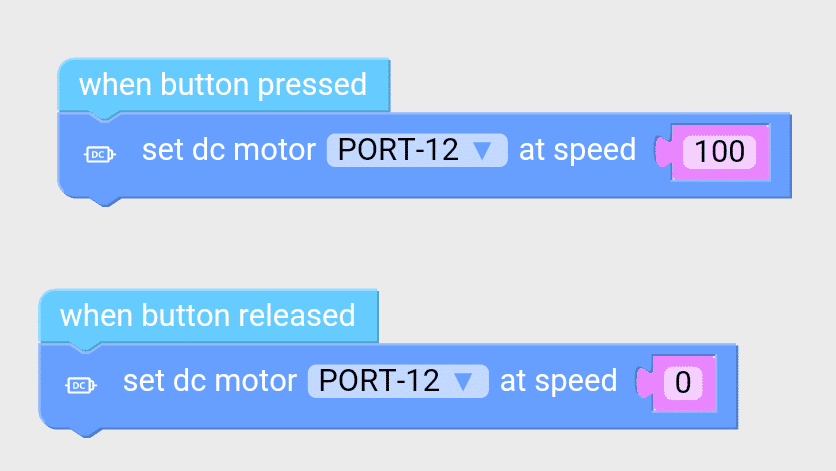
لتحريك القابض للإمساك بالأشياء، سوف نسمي الزر الثالث Grip
عند ضغط الزر سنضيف الأمر المتعلق بحركة محرك DC المسؤول عن حركة القابض
وتحديد منفذ التوصيل
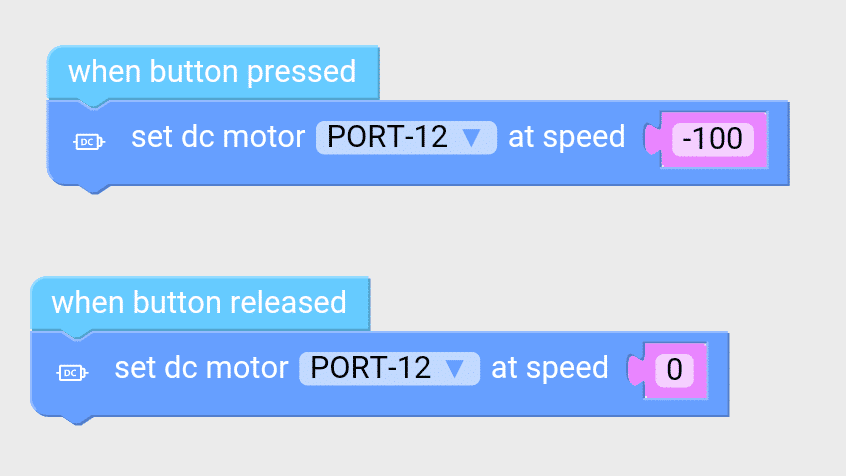
الزر الرابع سوف نسميه Un-Grip، لتحريك القابض لإفلات الأشياء
سنضيف نفس الكود البرمجي لكن بوضع السرعة بعلامة سالبة ( – ) لعكس اتجاه حركة المحرك وبالتالي عكس حركة القابض
الواجهة النهائية للتطبيق
لمزيد من المعلومات عن الأوامر البرمجية الأخرى يمكنك الرجوع لدرس جولة حول الأوامر البرمجية
نقوم بعد ذلك بحفظ المشروع Save وتحديث البرامج الثابتة من واجهة التطبيق Firmware لتتمكن من تجربة المشروع.