هناك حاجة إلى المتحكم لتحريك الروبوت من مكان إلى أخر. المتحكم له القدرة على تنفيذ برنامج و يكون مسؤولا عن جميع العمليات الحسابية، واتخاذ القرارات، و الاتصال . في هذا المشروع سيتم استخدام متحكم الراسبيري باي كـوحدة تحكم.
لا يمكن توصيل المحركات مباشرة مع الراسبيري باي، لأن المحركات تحتاج تيار عالي لا يستطيع الراسبيري باي إعطاءه. لهذا السبب سيتم استخدام Dual H-bridge كدائرة بين الراسبيري باي والمحركات.
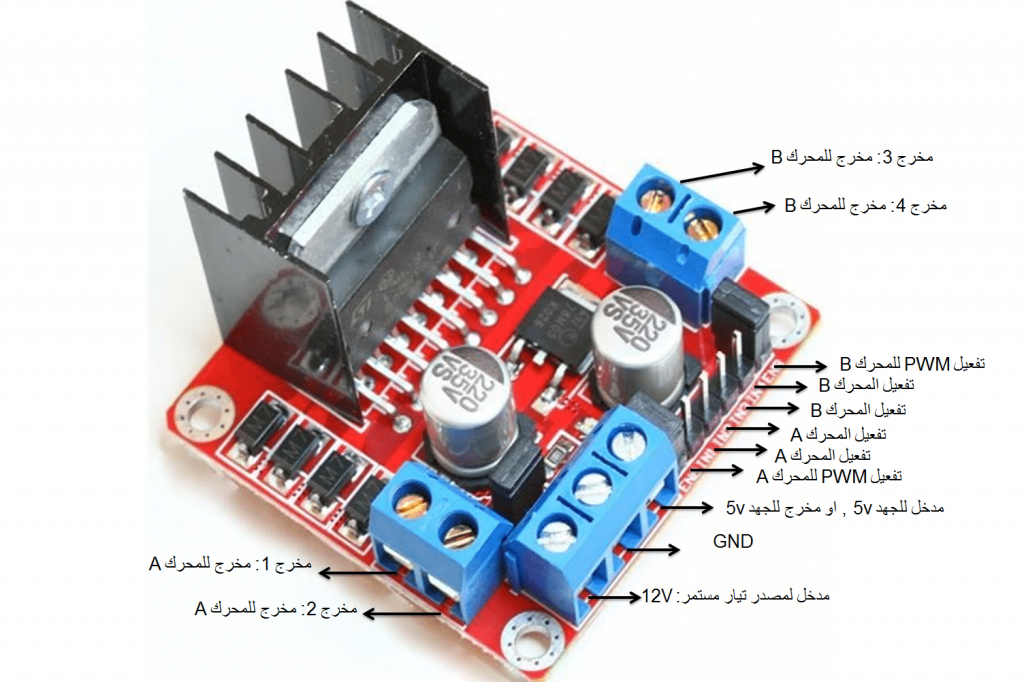
L298 H Bridge Module
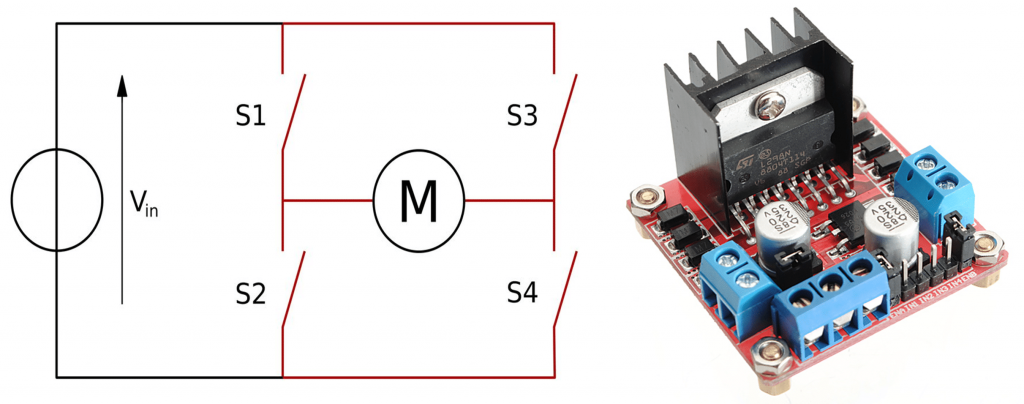
H-Bridge، يقوم بتحريك محرك الـ DC بإتجاه الامام و الخلف. وهو يتكون من اربع مفاتيح الكترونية S1,S2,S3,S4 (Transistors / MOSFETS / IGBT).
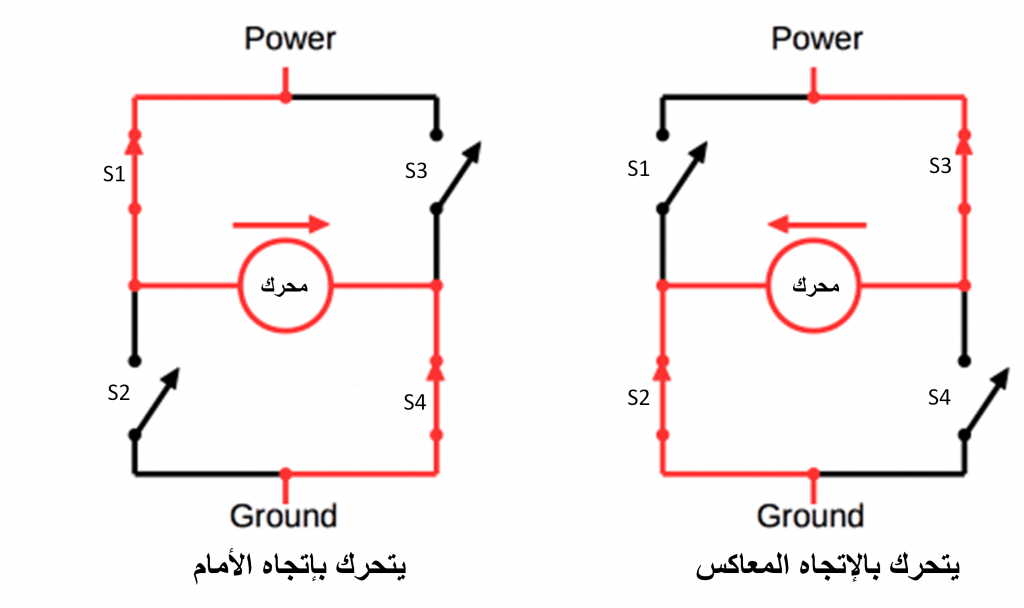
الية العمل: انظر للصورة اعلاه لفهم ألية العمل للـ H-Bridge . المفاتيح في نفس الجهة إما (S1,S2) أو (S3,S4)لا يتم إغلاقهم بنفس الوقت , سيتم حدوث ماس كهربائي .
H-bridge توفر لك دائرة متكاملة، أو يمكنك أن تقوم ببناء الدائرة بنفسك عن طريق إستخدام اربع Transistor او MOSFETs. في هذا المشروع سيتم استخدام L298 H-bridge Module الذي يمكن من خلاله التحكم في سرعة واتجاه المحركات.
وصف مداخل و مخراج الـ L298H-bridge Module :