تعلم إنشاء روبوت يشع الضوء على مدى زاوية 90 درجة.
روبوتات للأطفال| Robotics for kids
إجعل الروبوت يلقي التحية عند الإقتراب منه .
سنقوم في هذا المشروع ببرمجة لعبة Whac-A-mole من خلال استخدام عصا التحكم و RGB
تعلم كيفية برمجة روبوت يتتبع المسارات المختلفة بدقة عالية
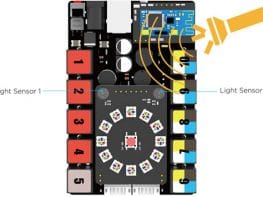
في هذا المشروع سنستخدم روبوت Ranger لبرمجة روبوت يتتبع مصدر الضوء.
برمجة الروبوت والتحكم به بواسطة مستشعر التسارع في الهاتف الذكي وتطبيق MakeBlock
صنع آلة تبريد باستخدام مستشعر الحرارة وقطع الكترونية أخرى.
عمل مروحة ذكية تعمل عند الاقتراب منها وتزداد سرعتها كلما قلت المسافة
مشروع محاكاة إشارة المرور باستخدام RGB ومحرك سيرفو ووحدة 7-segment
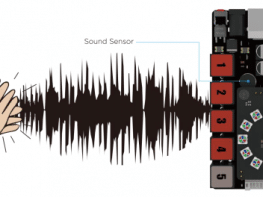
سنقوم بإعطاء الأوامر الصوتية للروبوت عن طريق استخدام مستشعر الصوت.
برمجة روبوت السومو باستخدام مستشعر الموجات فوق الصوتية ومستشعر تتبع المسار
برمجة مصباح طاولة ذكي باستخدام مستشعر الحركة
يجب عليك تسجيل الدخول للمتابعة. دخول تسجيل عضوية