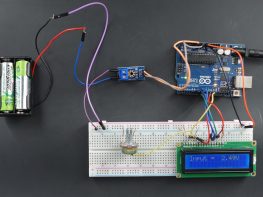
تعلم صنع جهاز لقياس جهد التيار المستمر بنفسك وذلك باستخدام الاردوينو (Arduino) و ...
Arduino| اردوينو Sensors | حساسات
سوف نتعلم ما هو مستشعر المغناطيسية وبرمجته مع الاردوينو لقراءة قيم تناظرية عند ...
تعلم صنع اضاءة ذكية باستخدام مستشعر مستكشف الحواجز بالأشعة تحت الحمراء وكيفية ...
تعرف على وحدة الاتصال الاسلكي SIM800L التي تساعدك على الاتصال أو ارسال الرسائل باستخدام ...
في هذا المشروع ستتعلم كيفية التحكم بالمصابيح عن طريق الصوت باستخدام ليتل بيتس.
Littlebits ليتل بيتس Sensors | حساسات
تغير ألوان الRGB باستخدام ريموت تحكم
تعلم كيفية استخدام المعقم بدون لمس باستخدام الاردوينو و محرك السيرفو
استخدام الاردوينو مع حساس الموجات فوق الصوتية فى عمل مسح للفضاء المحيط.
استخدام حساس درجة الحرارة lm35 لقياس درجة الحرارة و عرضها على شاشة LCD.
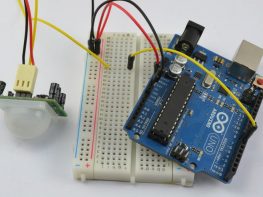
ستتعلم كيفية ارسال بريد الكتروني حال استشعار الحركة
في هذا الدرس ستقوم بإظهار درجة الحرارة ودرجة سطوع اضاءة الغرفة على الشاشة الكرستالية ...
في هذا الدرس ستتعلم كيفية اصدار الاصوات بمتحكم الأردوينو.
يجب عليك تسجيل الدخول للمتابعة. دخول تسجيل عضوية