



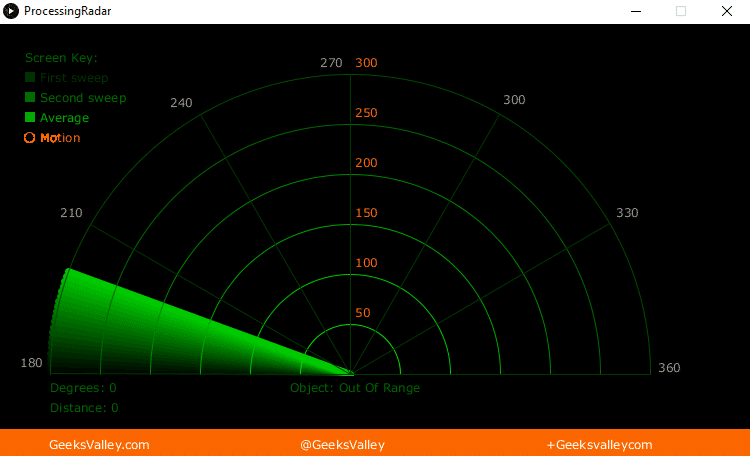
برمجة الواجهة الرسومية
الحاسوب بعد ارسال قيم الزاوية و المسافة من الاردوينو الى (processing IDE) ، يتم استقبالها بإستخدام دالة ()SerialEvent .
تقوم ()SerialEvent بقراءة البيانات من المنفذ التسلسلي (serial port) ثم نقوم بوضع قيم الزاوية و المسافة في متغيرات (degree, value). هذة المتغيرات سيتم استخدامها لرسم الرادار، و الخطوط، و الكشف عن الأجسام ، وتغير النصوص .
لعرض البيانات على الشاشة يتم انشاء Arrays لتخزين القيم الحديثة على newValue Array و عمل تحديث للقيم القديمة على oldValue Array . لأن الموقع اتباعا لحركة محرك السيرفو يتغير بإستمرار ، فسنفقد البيانات القديمة التي سيتم عرضها على الشاشة.
int[] newValue = new int[181]; int[] oldValue = new int[181];
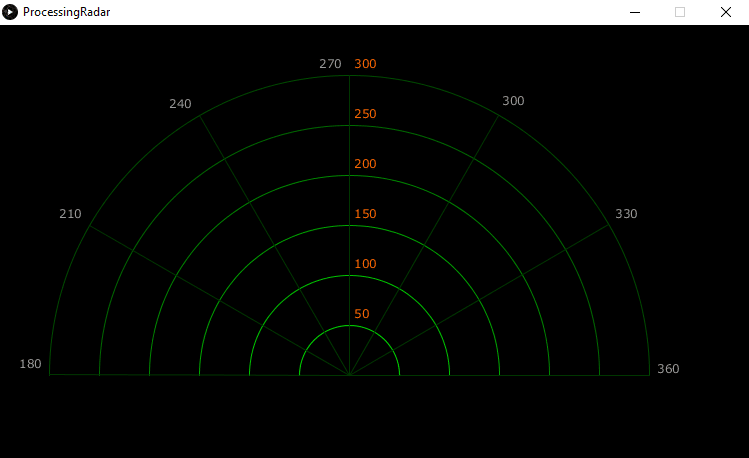
لرسم الرادار سيتم كتابة الداله ()drawRadar التي تتكون من دوال ()arc و ()line.
void drawRadar() {
for (int i = 0; i <=6; i++){
noFill();
strokeWeight(1);
stroke(0, 255-(30*i), 0);
arc(radius, radius, (100*i), (100*i),PI,TWO_PI);
fill(250, 103, 0);
noStroke();
text(Integer.toString(radarDist+50), 380, (305-radarDist), 50, 50);
radarDist+=50;
}
radarDist = 0;
for (int i = 0; i <= 6; i++) {
strokeWeight(1);
stroke(0, 55, 0);
line(radius, radius, radius + cos(radians(180+(30*i)))*w, radius + sin(radians(180+(30*i)))*w);
fill(153, 153, 153);
noStroke();
if (180+(30*i) >= 300) {
text(Integer.toString(180+(30*i)), (radius+10) + cos(radians(180+(30*i)))*(w+10), (radius+10) + sin(radians(180+(30*i)))*(w+10), 25,50);
}
else {
text(Integer.toString(180+(30*i)), radius + cos(radians(180+(30*i)))*w, radius + sin(radians(180+(30*i)))*w, 60,40);
}
}
}
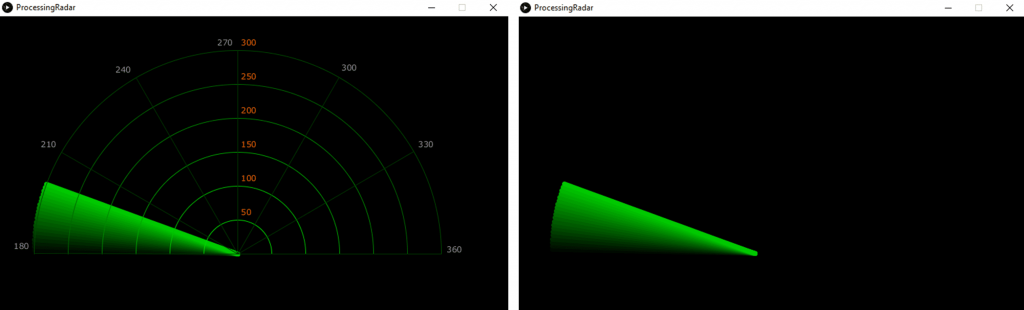
ليتم عمل مسح للرادار يتم رسم الخط الذي يتحرك جنب إلى جنب اتباعا لحركة محرك السيرفو بإستخدام الدالة ()setupSweep .
تستخدم الدالة ()setupSweep الدالة ()line التي تستخدم المتغير degree لإعادة رسم الخط لكل درجة.
void setupSweep(){
strokeWeight(7);
if (motion == 0) {
for (int i = 0; i <= 20; i++) {
stroke(0, (10*i), 0);
line(radius, radius, radius + cos(radians(degree+(180+i)))*w, radius + sin(radians(degree+(180+i)))*w);
}
} else { // if going right to left
for (int i = 20; i >= 0; i--) {
stroke(0,200-(10*i), 0);
line(radius, radius, radius + cos(radians(degree+(180+i)))*w, radius + sin(radians(degree+(180+i)))*w);
}
}
}
لإعداد تحديث الأشكال يتم عمل الدالة ()SetupShapes . سنقوم بإستخدام الدالة For loop للتحرك بين القيم التي تم تخزينها بالـ (Arrays (newValue, oldValue
void SetupShapes(){
noStroke();
fill(0,50,0);
beginShape();
for (int i = 0; i < 180; i++) {
x = radius + cos(radians((180+i)))*((oldValue[i]));
y = radius + sin(radians((180+i)))*((oldValue[i]));
vertex(x, y);
}
endShape();
fill(0,110,0);
beginShape();
for (int i = 0; i < 180; i++) {
x = radius + cos(radians((180+i)))*(newValue[i]);
y = radius + sin(radians((180+i)))*(newValue[i]);
vertex(x, y);
}
endShape();
fill(0,170,0);
beginShape();
for (int i = 0; i < 180; i++) {
x = radius + cos(radians((180+i)))*((newValue[i]+oldValue[i])/2);
y = radius + sin(radians((180+i)))*((newValue[i]+oldValue[i])/2);
vertex(x, y);
}
endShape();
}
لرسم موقع الاجسام التي تم رصدها ، نقوم بعمل الدالة ()drawObject .التي تستخدم المسافة الملتقطة من مستشعر الموجات فوق الصوتية و بالاشتراك مع الزاوية لرسم الجسم على الرادار.
void drawObject() {
if (firstRun >= 360) {
stroke(250,103,0);
strokeWeight(1);
noFill();
for (int i = 0; i < 180; i++) { if (oldValue[i] - newValue[i] > 35 || newValue[i] - oldValue[i] > 35) {
x = radius + cos(radians((180+i)))*(newValue[i]);
y = radius + sin(radians((180+i)))*(newValue[i]);
ellipse(x, y, 10, 10);
}
}
}
}
وللإطلاع على القيم التي تم استقبالها و النصوص تم إنشاء الدالة ()drawText .
يمكنك تنزيل كود الـ (Processing) المتعلق بالواجهة الرسومية للرادار من هنـا.