في هذا المشروع، سنتعلم كيفية التحكم بالراسبيري باي من خلال واجهة الويب. وهذا سوف يسمح لك للتحكم بالمحركات والإضاءة وغيرها من القطع الإلكترونية عبر شبكة الإنترنت. سنقوم خلال هذا المشروع بالتحكم والسيطرة على الروبوت عن طريق الويب.
الأدوات المستخدمة :


كاميرا للراسبري باي (raspberry pi camera module) أو USB webcam
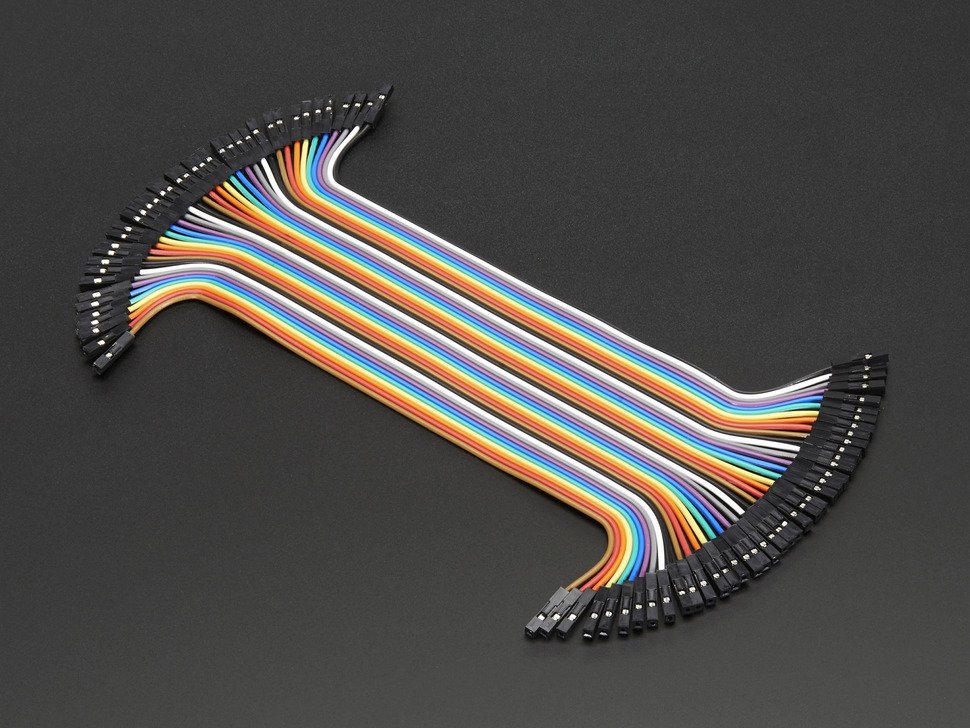
اسلاك توصيل أنثى/أنثى (Jumper Wires Female/Female)
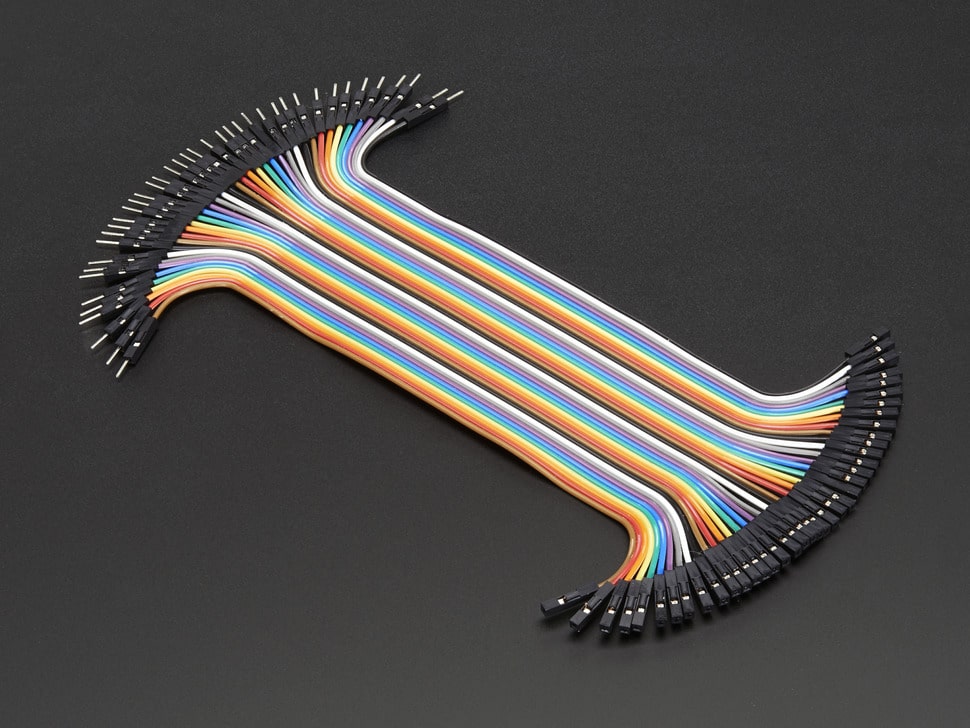
اسلاك توصيل أنثى/ذكر (Jumper Wires Female/male)
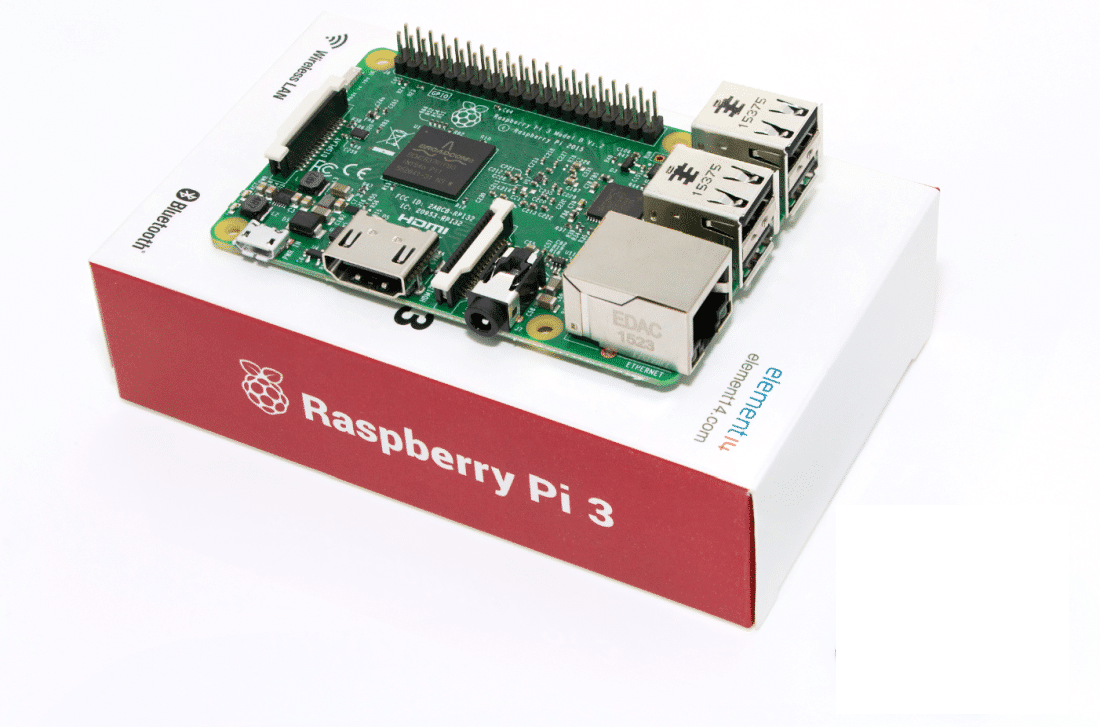
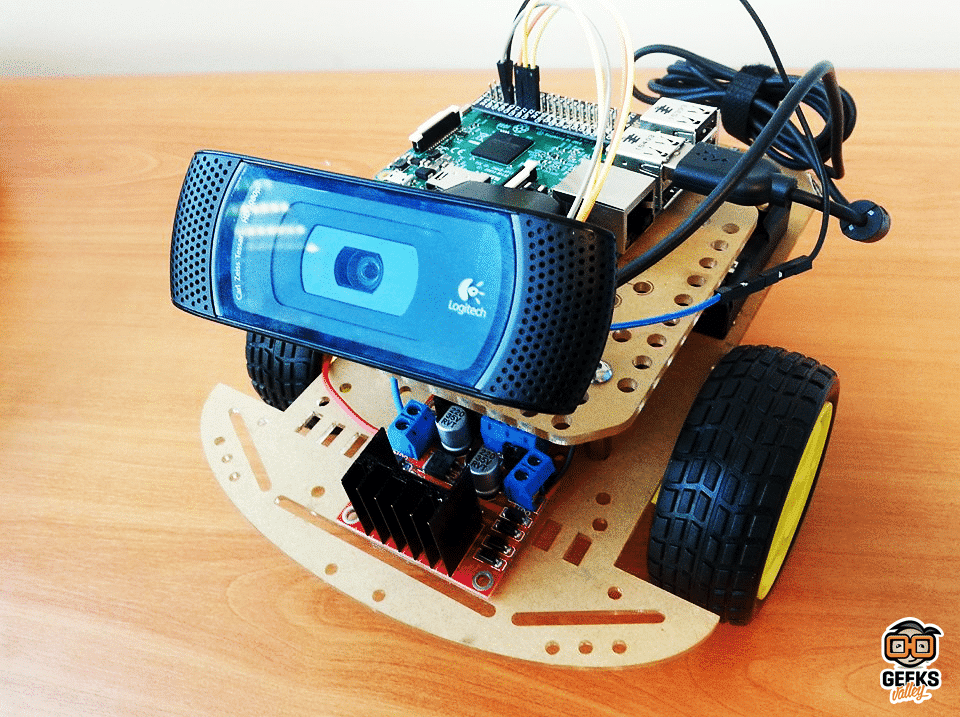
راسبيري باي (Raspberry Pi 3 Model B)
ما هو الروبوت ؟
الروبوت هو جهاز كهروميكانيكي قادر على التفاعل بطرية أو بأخرى مع بيئته، و اتخاذ قرارات مستقلة أو إجراءات من أجل تحقيق مهمة محددة.
يتكون الروبوت من العناصر التالية:
1- الهيكل.
2- المشغل الميكانيكي .
3- وحدة التحكم.
4-المدخلات/ الحساسات.
5- امدادات الطاقة.
في الخطوات التالية سنذكر بعض العناصر المذكورة اعلاه، بحث يمكن أن نفهمها بسهولة.
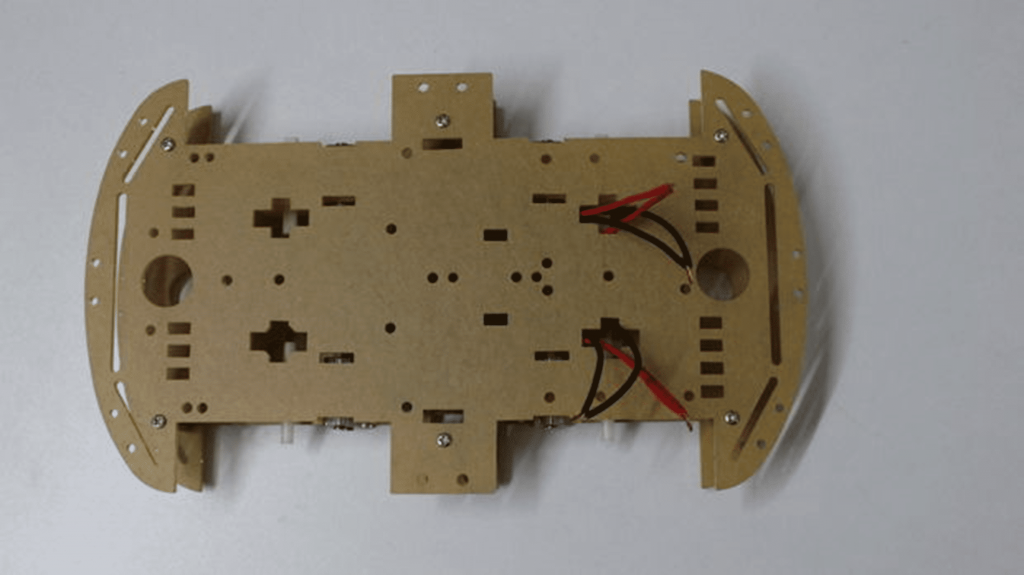
الهيكل (Structure / Chassis) :

يتألف الهيكل من المكونات الفزيائية. الروبوت يتكون من مكون او اكثر من المكونات الفزيائية التي تتحرك لتنفيذ مهام معينة. وفي حالتنا هيكل السيارة و العجلات تمثل هيكل الروبوت
المشغل الميكانيكي Actuator :
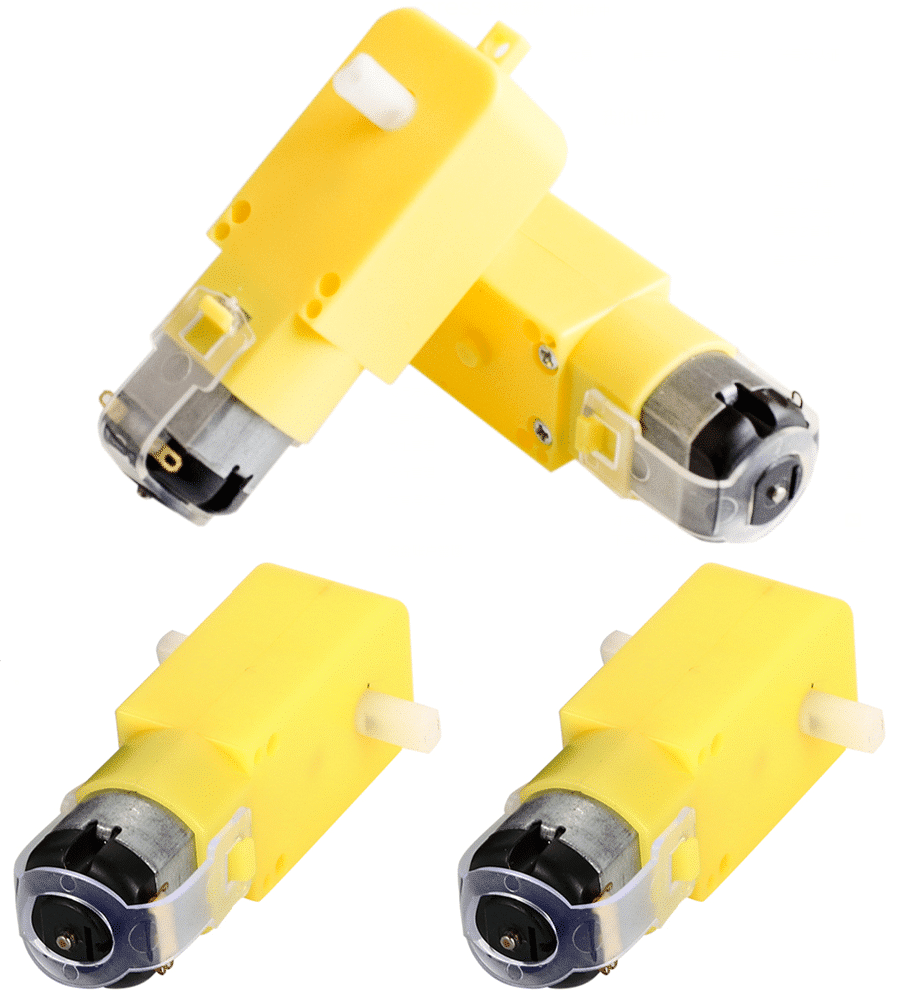
المحرك هو جهاز يقوم بتحويل الطاقة (في مجال الروبوت، تكون الطاقة الكهربائية) الى طاقة حركية. تنتج معظم المحركات إما الحركة الدورانية أو الخطية.
في حالتنا المحرك هو(DC Gear motor) وهو بالاساس عبارة عن محرك DC مركب مع علبة تروس (gear) تعمل على تقليل سرعة المحرك و زيادة عزم الدورات .
إعداد أطراف المحركات :
قطع اربع قطع من الأسلاك (الحمراء و السوداء) مع طول حوالي 5-6 انش. قم بتجريد السلك من العازل في كل نهاية ، ثم قم بلحم الأسلاك على المحركات.
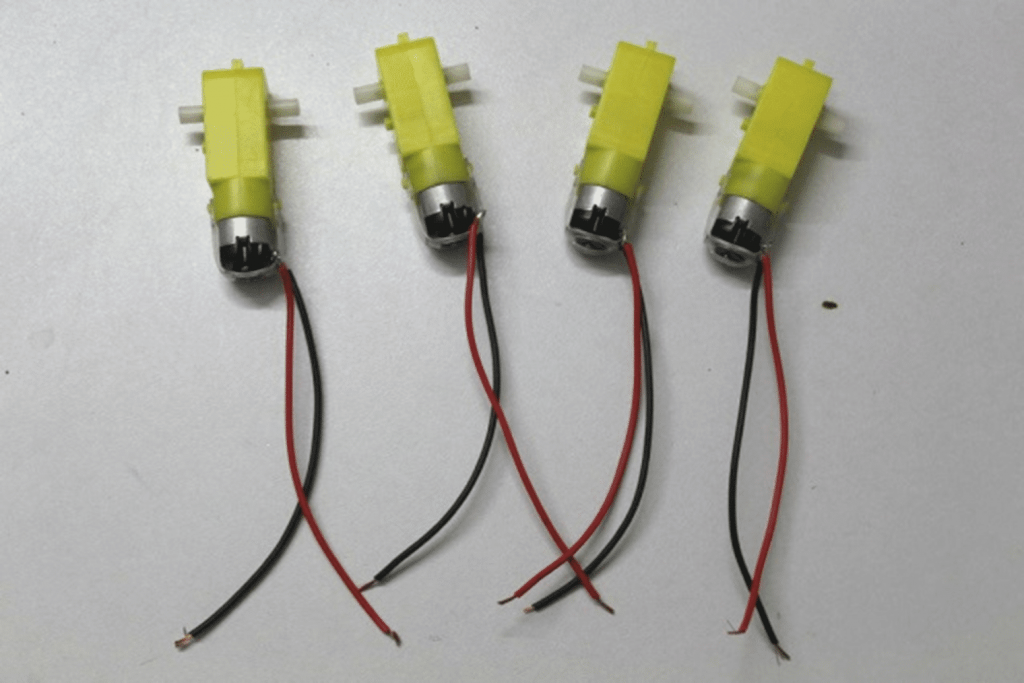
يمكنك التحقق من قطبية المحركات من خلال توصيلها إلى بطارية. اذا كانت تدور في الاتجاه إلى الأمام (السلك الاحمر مع القطب الموجب و الأسود مع القطب السالب) هذا يدل على ان التوصيل تم بشكل صحيح.
تركيب المحرك :
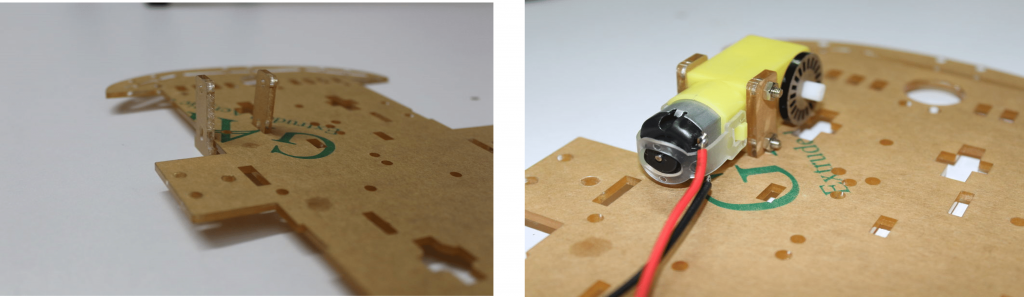
لاحظ أن الأسلاك على كل محرك تشير الى إتجاه مركز الهيكل.
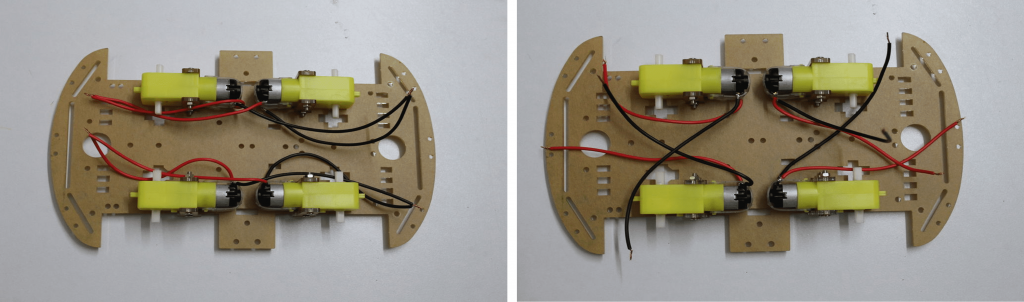
قم بضم اثنان من الأسلاك الحمراء و اثنان من الاسلاك السوداء معا على كل جانب من جوانب الهيكل. بعد الانضمام، سيكون لديك اثنان من النهايات على الجانب الايمن و اثنان على الجانب الأيسر.
تثبيت السقف العلوي:
بعد تركيب الأربع محركات في الطابق السفلي، قم بتركيب السقف العلوي. ثم قم بسحب نهايات الاسلاك نحو السطح العلوي.
هناك حاجة إلى المتحكم لتحريك الروبوت من مكان إلى أخر. المتحكم له القدرة على تنفيذ برنامج و يكون مسؤولا عن جميع العمليات الحسابية، واتخاذ القرارات، و الاتصال . في هذا المشروع سيتم استخدام متحكم الراسبيري باي كـوحدة تحكم.
لا يمكن توصيل المحركات مباشرة مع الراسبيري باي، لأن المحركات تحتاج تيار عالي لا يستطيع الراسبيري باي إعطاءه. لهذا السبب سيتم استخدام Dual H-bridge كدائرة بين الراسبيري باي والمحركات.
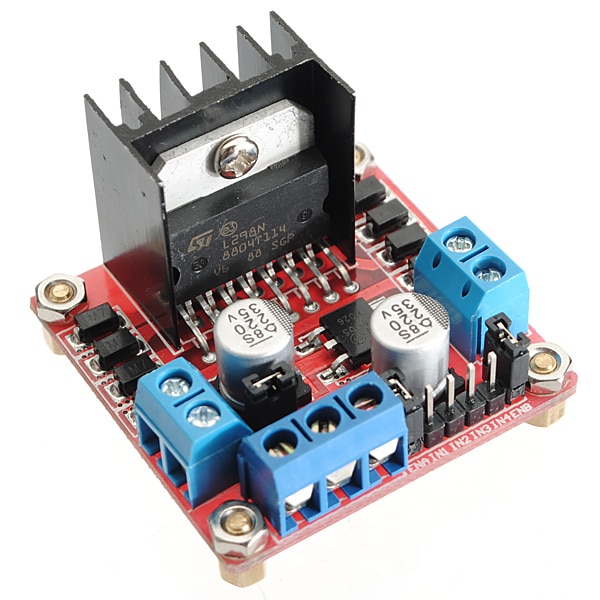
L298 H Bridge Module
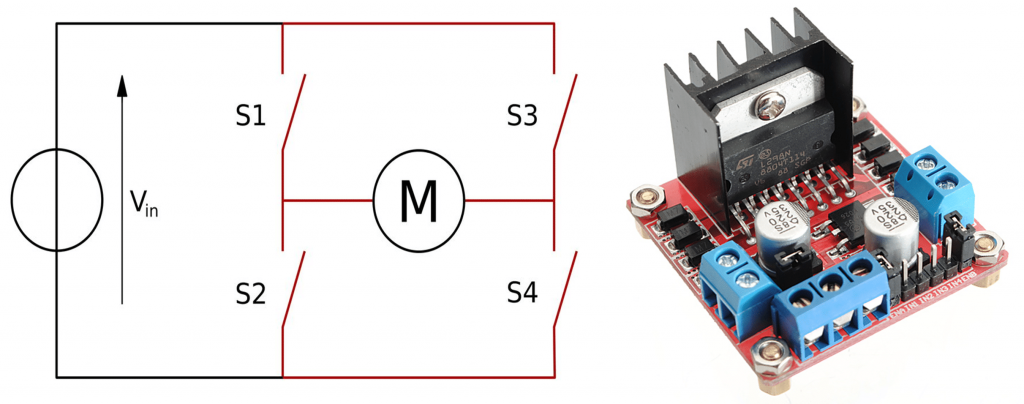
H-Bridge، يقوم بتحريك محرك الـ DC بإتجاه الامام و الخلف. وهو يتكون من اربع مفاتيح الكترونية S1,S2,S3,S4 (Transistors / MOSFETS / IGBT).
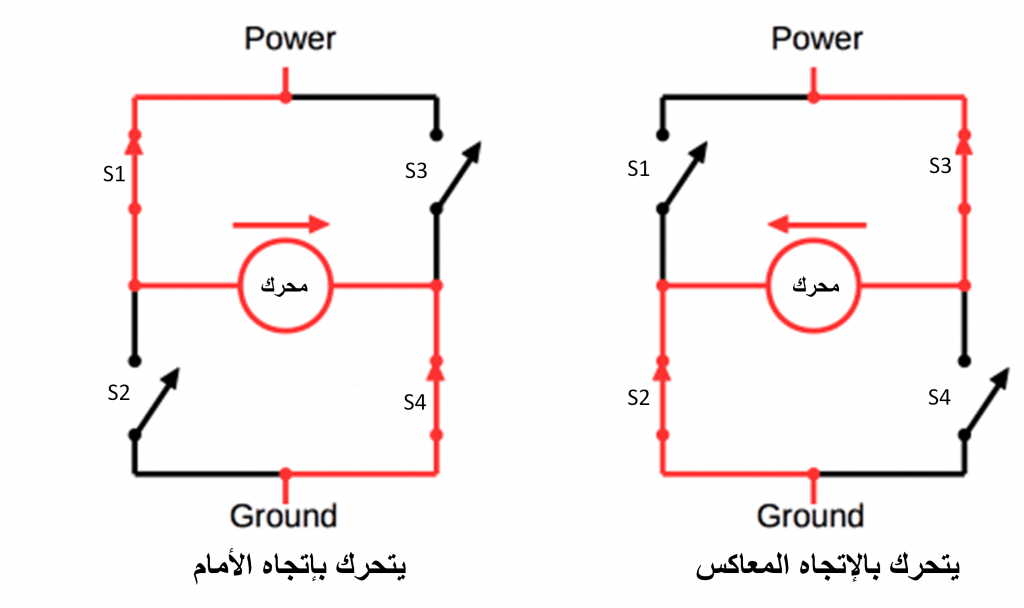
الية العمل: انظر للصورة اعلاه لفهم ألية العمل للـ H-Bridge . المفاتيح في نفس الجهة إما (S1,S2) أو (S3,S4)لا يتم إغلاقهم بنفس الوقت , سيتم حدوث ماس كهربائي .
H-bridge توفر لك دائرة متكاملة، أو يمكنك أن تقوم ببناء الدائرة بنفسك عن طريق إستخدام اربع Transistor او MOSFETs. في هذا المشروع سيتم استخدام L298 H-bridge Module الذي يمكن من خلاله التحكم في سرعة واتجاه المحركات.
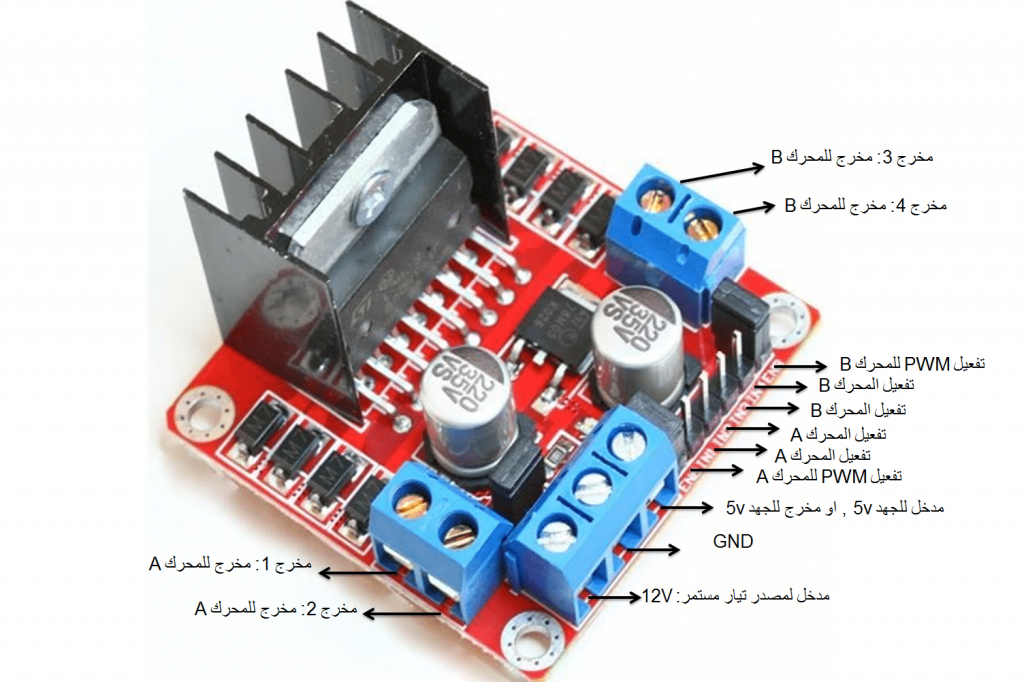
وصف مداخل و مخراج الـ L298H-bridge Module :
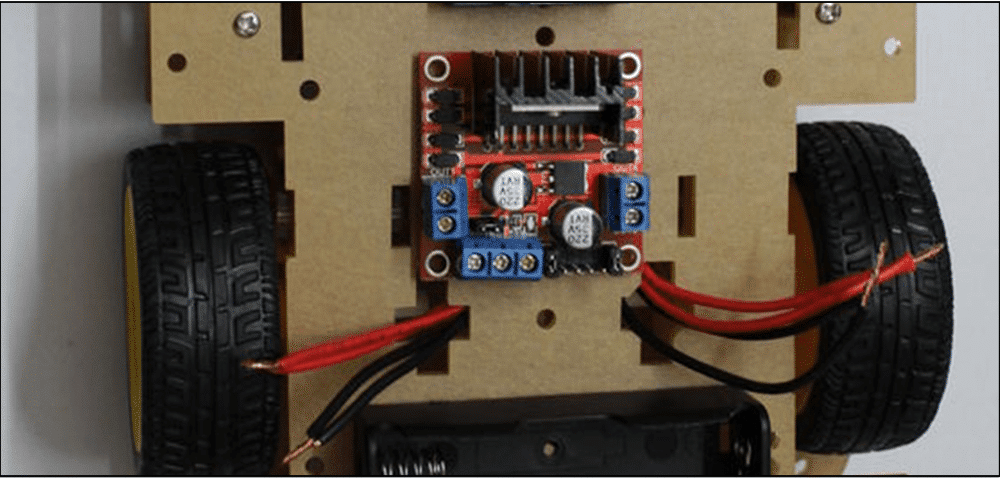
توصيل جميع القطع الإلكترونية :
أولا: نقوم بتوصيل الأسلاك ذات اللون الأحمر معا والأسلاك ذات اللون الأسود معا لكل من الجهة اليمنى واليسرى.
اتبع الجداول التالية ليتم توصيل باقي القطع :
توصيل المحركات :
| L298H-bridge | أسلاك المحركات |
| OUT 1 | الأسلاك ذات اللون الأسود على جهة اليسار (-) |
| OUT 2 | الأسلاك ذات اللون الأحمر على جهة اليسار (+) |
| OUT 3 | الأسلاك ذات اللون الأسود على جهة اليمين (-) |
| OUT 4 | الأسلاك ذات اللون الأحمر على جهة اليمين (+) |
توصيل الطاقة مع قطعة L298H-bridge :
| L298H-bridge | البطاريات |
| 12 V | السلك ذو اللون الأحمر للبطارية (+) |
| GND | السلك ذو اللون الأسود للبطارية مع GND على الراسبيري باي |
توصيل الراسبيري باي مع L298H-bridge :
| L298H-bridge | الراسبيري باي (WiringPi Pin) |
| IN 1 | GPIO 0 |
| IN 2 | GPIO 7 |
| IN 3 | GPIO 3 |
| IN 4 | GPIO 2 |
| GND | GND |
تثبيت و إستخدام المكتبة Wiring Pi :
مكتبة Wiring Pi هي مكتبة الوصول إلى GPIO على لوحة الراسبيري باي . و انها تسمح لك التحكم بمداخل و مخارج الراسبيري باي من خلال bash script او مباشر من خلال سطر أوامر.
تحقق أولا ما اذا كانت مكتبة wiringPi مثبتة مسبقا ام لا ، من خلال نافذة الـ terminal قم بتشغل الامر التالي:
gpio -v
اذا لم تقم بتثبيت GIT، يمكنك تثبيتها من خلال الأمر التالي :
sudo apt-get install git-core
اذا تم ظهور رسالة خطأ هنا ، تأكد من تحديث الراسبيري باي إلى أخر اصدار من Raspbian :
sudo apt-get update sudo apt-get upgrade
للحصول على WiringPi باستخدام GIT، قم بكتابة الأمر التالي:
cd git clone git://git.drogon.net/wiringPi
cd ~/wiringPi git pull origin
سوف تجلب النسخة المحدثة ثم يمكنك إعادة تشغيل البرنامج من خلال الأمر أدناه .
لبناء/ تثبيت البرنامج :
cd ~/wiringPi ./build
الكتابة و القراءة من المنافذ عن طريق استخدام أوامر المكتبة wiringPi :
الآن يجب أن تكون قادر على إستخدام الأداة، قم بكتابة الأمر التالي على نافذة الـ Terminal :
gpio mode 0 out
اذا لم يتم ظهور شي أو رسالة خطأ فقد تم التثبيت للمكتبة بشكل صحيح. في حال تم ظهور رسالة الخطأ “command not found error” أو شي من هذا القبيل، تأكد من تثبيت و بناء المكتبة. للقيام بتشغيل و إطفاء الـ Wiring pin 0 )LED) ، تحتاج اولا إلى تعيين الدبوس كمخرج من خلال الأمر التالي :
gpio mode 0 out
“0”هي رقم المنفذ wiring، و “OUT” لتعيين المنفذ كمخرج . سيتم تشغيل الـ LED من خلال الأمر التالي :
gpio write 0 1
“0” للدلاله على رقم المنفذ ، و “1” لوضع الدبوس في حالة التشغيل الـ LED( للتشغيل 1 و إطفاءه 0) . و لإيقاف التشغيل ببساطة استخدم الأمر :
gpio write 0 0
وهناك أيضا اوامر لقراءة GPIO والتي تسمح لقراءة وضع الدبوس. فيمكن من خلاله معرفة حالة الضوء هل هو في حالة التشغيل او الإيقاف إذا لم تكن على إستطاعه لرؤية الضوء. يمكنك ذلك عن طريق الأمر التالي :
gpio read 0
“0” لتعيين رقم المنفذ Wiring. هذا الأمر يقوم بترجيع قيمة 1 اذا كان الضوء في حالة التشغيل و قيمة 0 اذا كان الضوء في حالة الإيقاف.
وأخيرا مكتبة wiringPi تحتوي على الكثير من الأوامر و الدوال التي تمكنك من التحكم بمداخل و مخارج الراسبيري باي ولكن لن يتم تغطيتها جميعها في هذا المشروع. يمكنك الاطلاع على هذه الروابط اذا كنت مهتم بمعرفة المزيد :
http://wiringpi.com/reference/
https://projects.drogon.net/raspberry-pi/wiringpi/the-gpio-utility/
سنقوم بإنشاء صفحة ويب على شبكة النت ، حيث انها ستكون متوافقه مع جميع الأجهزة ، و ستكون بحاجة لمعرفة اربع لغات : CSS,HTML (نمط الصفحة)، PHP (للتفاعل مع الخادم )، JavaScript (التفاعلات مع المستخدم) . نحن بحاجة لتثبيت خادم الويب على الراسبيري باي. في حالتنا نحن لسنا بحاجة إلى قاعدة بيانات MySQL ، فقط بحاجة إلى خادم HTTP و PHP.
تثبيت خادم الويب(Web Server) :
أولا قم بعمل تحديث للراسبيري باي :
sudo apt-get update
أولا قم بتثبيت حزمة apache2 ، من خلال الأمر التالي :
sudo apt-get install apache2 -y
الان قم بالتحقق ما اذا كان الخادم (Server) يعمل، قم بكتابة العنوان IP الخاص بالراسبيري باي على متصفح الويب. اذا كان يعمل ستظهر رسالة “It works!” كما هو موضح بالصورة أدناه.
إذا لم يتم مثل ما سبق، قم بالتحقق من العنوان IP الخاص بالراسبيري باي من خلال الأمر التالي :
ifconfig
أو قم بمحاولة إعادة تثبيت Apache أو إعادة تشغيل الراسبيري باي.
للسماح للـ apache بمعالجة ملفات PHP، انت بحاجة إلى تثبيت PHP5 ووحدة PHP5 للـApache. قم بتتبع الخطوات التالية ليتم التثبيت :
sudo apt-get install php libapache2-mod-php -y
الملف الخاص بواجهة المستخدم :
قم بالدخول إلى ملف /var/www/html/ عبر نافذة الـTerminal من خلال الأمر التالي :
cd /var/www/html
قم بعرض الملفات الموجودة على هذا الملف بإستخدام الامر التالي:
ls
سيظهر لك ملف واحد يسمى “index.html” هذا الملف يتوافق مع صفحة “It works!”. يمكنك حذفه ليتم إنشاء الصفحة الخاصة بهاذا المشروع. قم بحذف الملف بإستخدام الأمر التالي :
sudo rm index.html
و إنشاء ملف أخر يسمى “index.php” :
sudo nano index.php
ثم قم بكتابة النص التالي داخل الملف:
<?php phpinfo(); ?>
بعد حفظ الملف ، قم بعمل تحديث للمتصفح الخاص بك. يجب أن تشاهد صفحة طويلة مع الكثير من المعلومات حول الخادم و PHP .
أولا، انت بحاجة إلى تفعيل بث فيديو مباشر عبر صفحة ويب. قم بتتبع خطوات درس بث فيديو مباشر عبر شبكة الإنترنت .
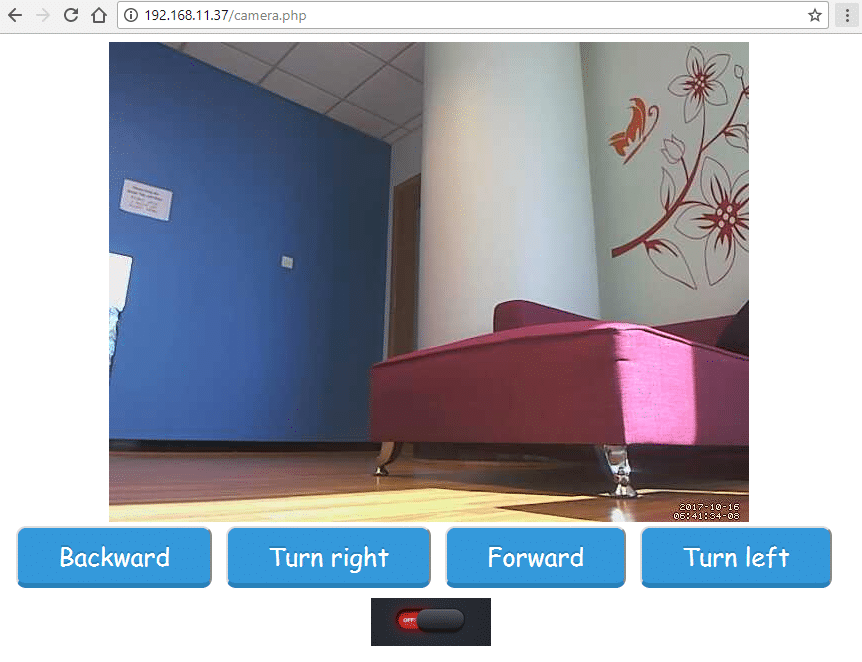
إنشاء واجهة التحكم :
تتألف واجهة التحكم من فيديو الكاميرا التي تم تفعيله بالخطوة السابقة، واربع مفاتيح تحكم للسيطرة على محرك السيارة.
سيتم إنشاء واجهة الصفحة بإستخدام لغةHTML، و لتفاعلات الخادم يتم إنشاء صفحة PHP، و JAVAScript لإدارة التفاعل مع المستخدم و الرسوم المتحركة للصفحة. ويمكنك استخدام CSS لتخطيط و تنسيق الصفحة مثل الخلفية أو مفاتيح التحكم .
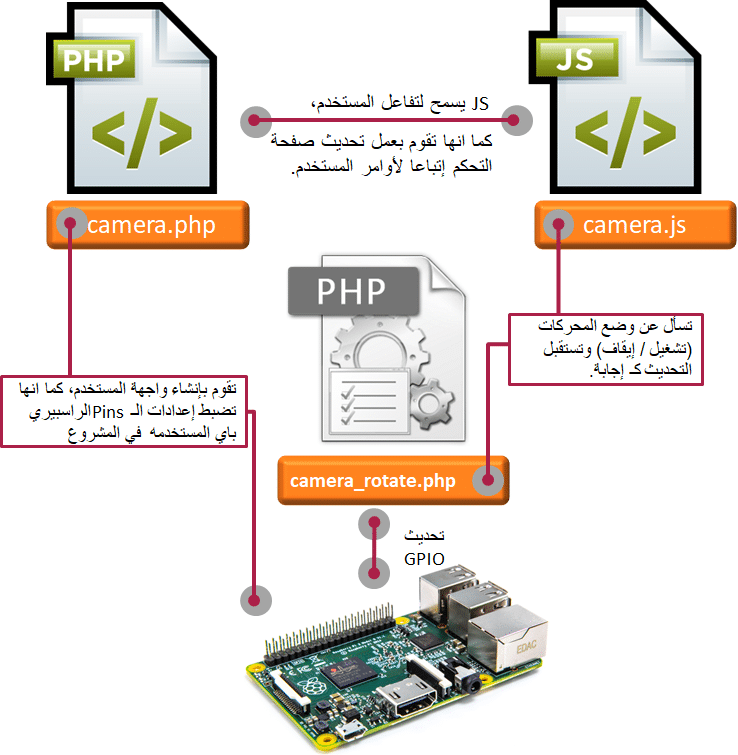
اولا نحن بحاجة لملف “camera.php” لإنشاء الواجهة ولتفاعل الخادم . هذه الصفحة هي الصفحة الرئيسية التي تحتوي على مفاتيح التحكم بالمحركات، كما تحتوي على بث الفيديو المباشر.
ملف Camera.php :
يتم استخدام لغة الـ HTML لتصميم واجهة المستخدم :
أولا : يتم إدراج فيديو البث عن طريق الأمر التالي، كما يتم تحديد الـ src URL (عنوان الويب ) الخاص بالبث المباشر
<img height="480" width = "640" src="http://YourIPAddress:8081" />
ثم نقوم بإدراج اربعة مفاتيح تحكم بإستخدام الأمر التالي :
<button id="myP" onmousedown="mouseDown(02)" onmouseup="mouseUp(02)">Backward</button> <button id="myP" onmousedown="mouseDown(03)" onmouseup="mouseUp(03)">Turn right</button> <button id="myP" onmousedown="mouseDown(37)" onmouseup="mouseUp(37)">Forward</button> <button id="myP" onmousedown="mouseDown(27)" onmouseup="mouseUp(27)">Turn left</button>
بعد ذلك، بإستخدام لغة الـ PHP نقوم بضبط إعدادات GPIO المستخدمة على الراسبيري باي كمخرج، وإعطاء الـ Pins المستخدمة القيم الإبتدائية :
system("gpio mode 0 out");
system("gpio write 0 0");
system("gpio mode 2 out");
system("gpio write 2 0");
system("gpio mode 3 out");
system("gpio write 3 0");
system("gpio mode 7 out");
system("gpio write 7 0");
لجعل هذه المفاتيح الأربعة تعمل مع المحركات (على سبيل المثال عند الضغط على مفتاح الرجوع للخلف يتم اشارات إلى المحركات من شأنها تحريك الروبوت للخلف)، لعمل ذلك يتم إنشاء ملفات أخرى :
– ملف camera.js يحتوي هذا الملف على الدالتين mouse_up و mouse_down للتحكم بمنافذ الراسبيري باي.
– ملف camera_rotate.php يتلقى المحتوى من camera.js، وبعد ذلك يتم تطبيق الإشارات على الـ GPIO المستخدمة في المشروع عن طريق إرسال إشارات إلى المحركات للتحكم بها إما 0v أو 5v.
يمكنك تنزيل ملفات صفحة الويب لهذا المشروع من هنا. يجب حفظ جميع الملفات في /var/www/html على الراسبيري باي.
الآن قم بالإنتقال إلى شبكة الإنترنت والدخول إلى YourRaspiIPAddress/camera.php ، ستتمكن من رؤية بث الكاميرا، وسيتحرك الروبوت عند الضغط على أحد المفاتيح.