تستخدم المحركات بشكل شائع في مجال الروبوتات، و يمكننا أن نتحكم بهذه الروبوتات عن طريق ربطها بالانترنت، في هذا المشروع نقوم بتوصيل محرك سيرفو مع راسبيري باي Raspberry Pi والتحكم به من خلال صفحة ويب باستخدام النود-ريد (Node-RED)سيتم إنشاء صفحة منقلة لعرض زاوية المحرك و مزلاج من درجة 0-180 و ترسل قيم الزاوية المراد تحريكها إلى راسبيري باي (Raspberry Pi) للتحكم بمحرك سيرفو ،
المواد و الأدوات
1X راسبيري باي

1X ذاكرة (8 قيقا كحد أدنى )


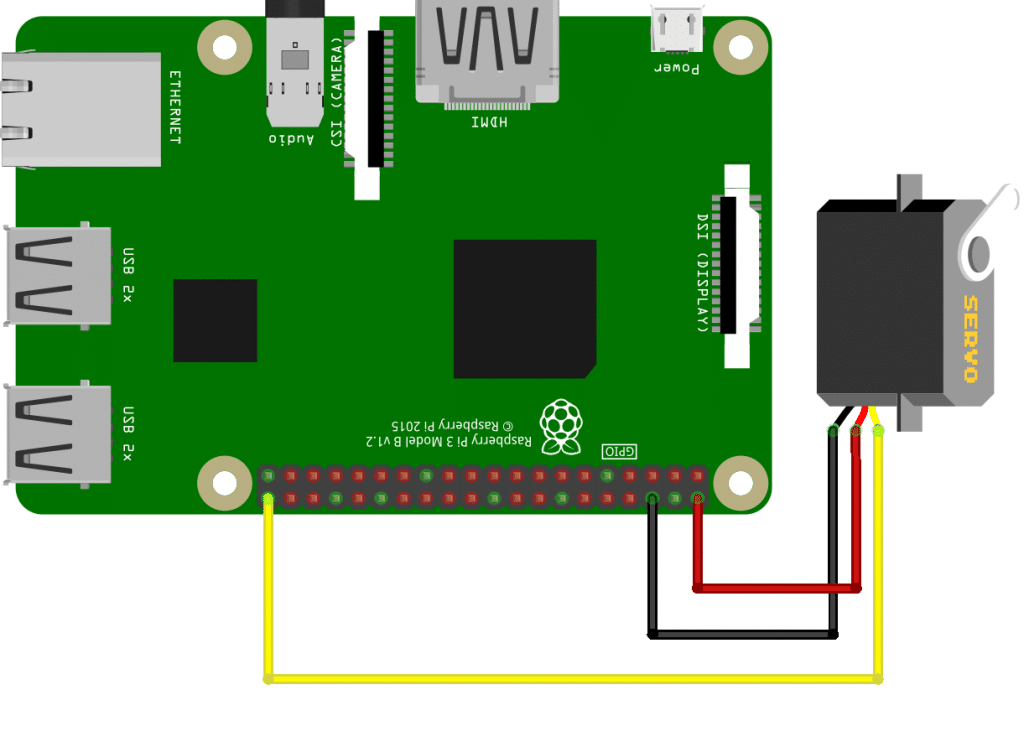
توصيل الدائرة
تثبيت النودريد (Node-RED)
يتم تثبيت النود-ريد (Node-RED) عند تثبيت نظام التشغيل راسبيان (Raspbian) النسخة الكاملة على راسبيري باي، لكن اذا ثبتت نظام (Raspbian Lite) فإنه لا يتضمن على النود-ريد (Node-RED) فلذلك في البداية ستحتاج إلى اتباع الخطوات التالية.
ابدأ بتثبيت أدوات (git) ، بالإضافة إلى أدوات البناء الأساسية التي ستكون مطلوبة في الخطوة التالية. عن طريق الأمر :
sudo apt install build-essential git
قم بتشغيل أمر (bash) لتثبيت نسخة جديدة من (Node-RED) عن طريق السطر التالي :
bash <(curl -sL https://raw.githubusercontent.com/node-red/linux-installers/master/deb/update-nodejs-and-nodered)
أثناء عملية التثبيت سيتطلب أن تجيب بنعم مرتين و ذلك بكتابة (Y) سيستغرق التثبيت بعض الوقت و بعد اكتمال التثبيت تظهر معلومات حول إعدادات نود-ريد (Node-RED) في وحدة التحكم.
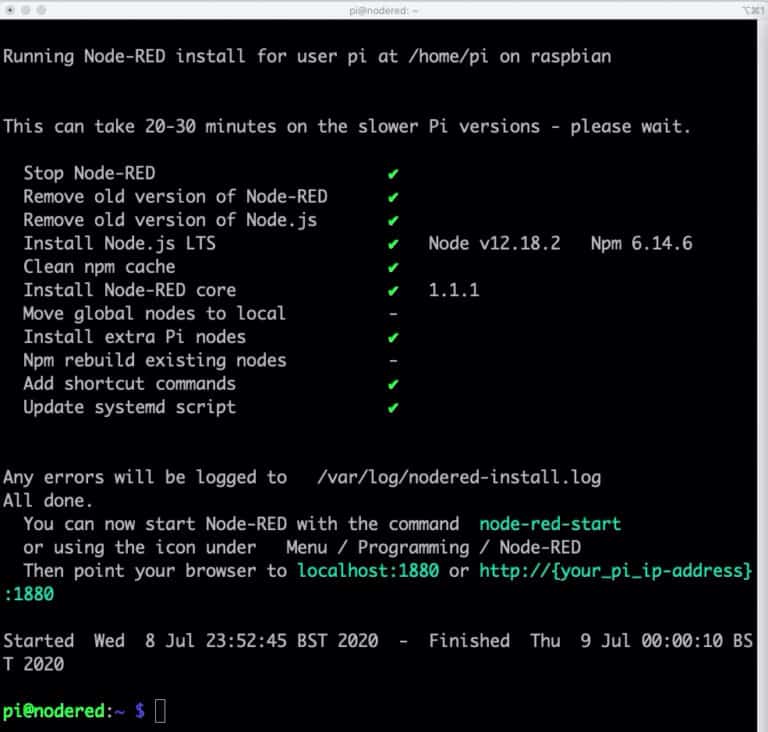
اذا كنت تستخدم راسبيري باي (Raspberrypi 4) الذي يمتلك ذاكرة عشوائية أكثر من 2 غيغابايت يمكن البدء بخدمة نود-ريد ( Node-RED).بكتابة الأمر التالي:
node-red-start
بالنسبة لإصدارات راسبيري باي ( Raspberry Pi) الأقدم من الأفضل تحديد مقدار ذاكرة الوصول العشوائي المتاحة يمكن استخدام الأمر التالي:
node-red-pi --max-old-space-size=256
في ثواني سوف تبدأ خدمة النود-ريد (Node-RED) اكتب http: //nodered.local: 1880 في شريط العنوان الخاص بمتصفحك
اكتب عنوان IPالخاص بالراسبيري باي لديك بدل من “nodered.local”
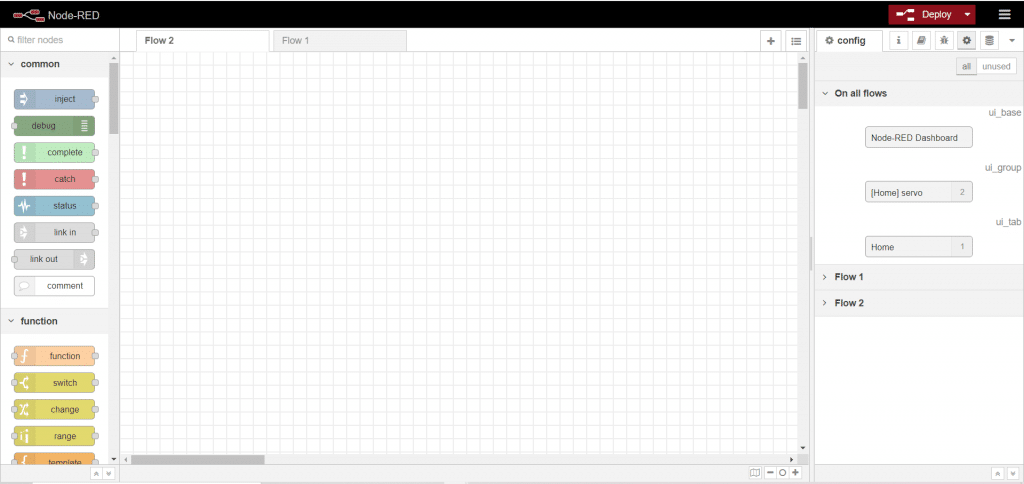
و ستظهر لديك واجة النود-ريد
إنشاء التدفق
في البداية يمكنك الاطلاع على السلسلة التعليمية الخاصة بالنود-ريد (Node-RED) من الرابط
أولًا: الاتصال بمنفذ الادخال و الاخراج (GPIO) في لوحة الراسبيري باي :
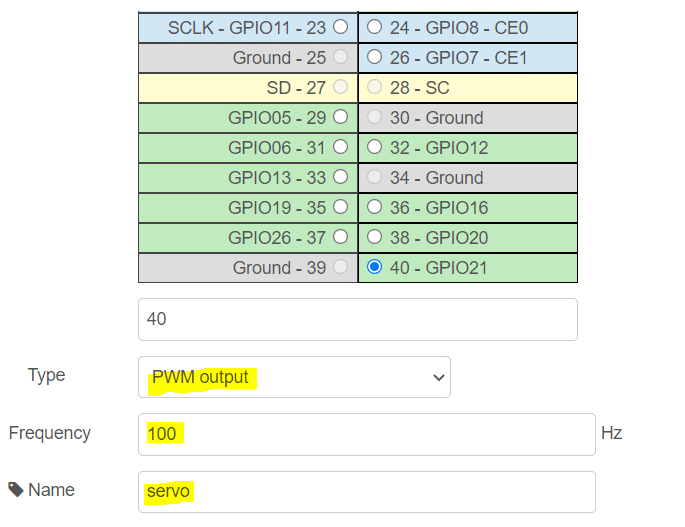
من قسم عقد راسبيري باي نسحب المخرجات “rpi gpio” و التي تكون رمز الراسبيري على اليمين
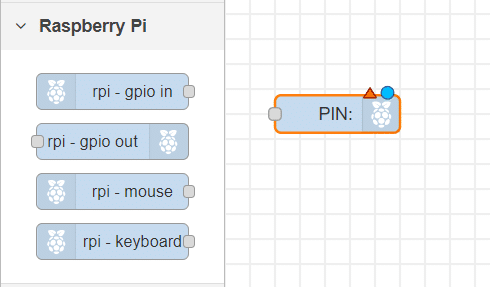
حدد المنفذ الذي قمت بتوصيل محرك سيرفو معه
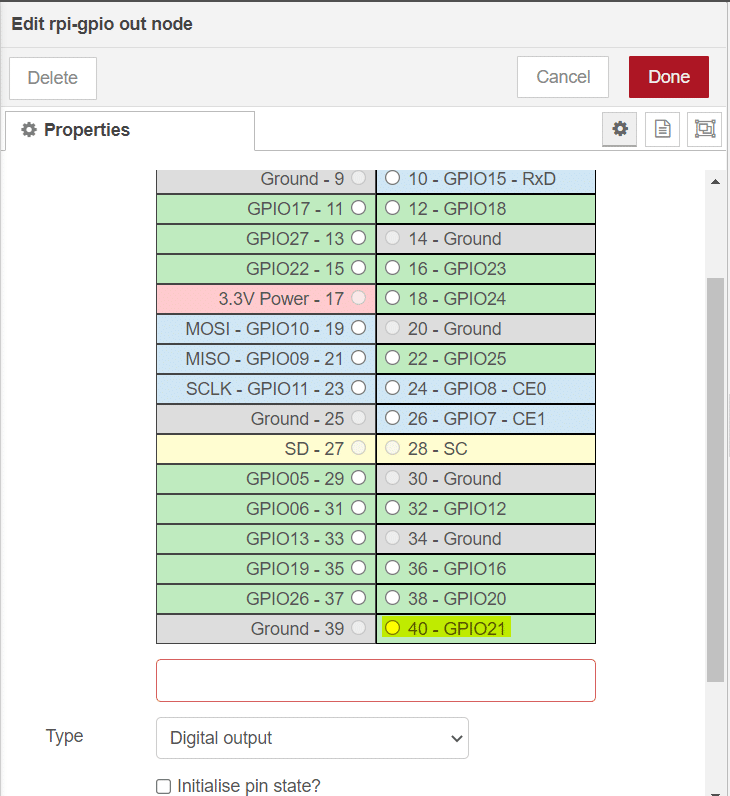
نحدد نوع الاشارة و قيمة التردد
ثانيًا : تعين قيم التحكم بالخرج
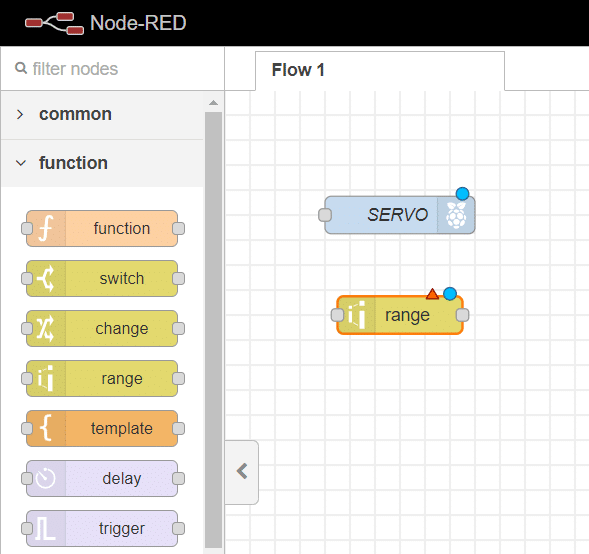
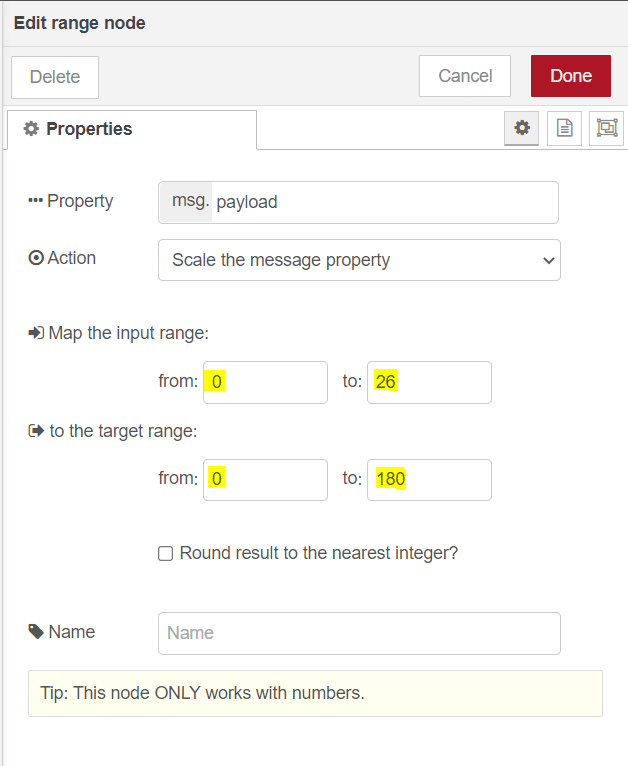
سنقوم بمعادلة قيم الدخل (0-26) مع أعلى و أقل قيمة لزاوية محرك سيرفو التي نود أن يتحرك خلالها و هي (0-180) قسم الدوال نسحب “range”
نحدد المدى للدخل ،و كذلك نحدد المدى للخرج
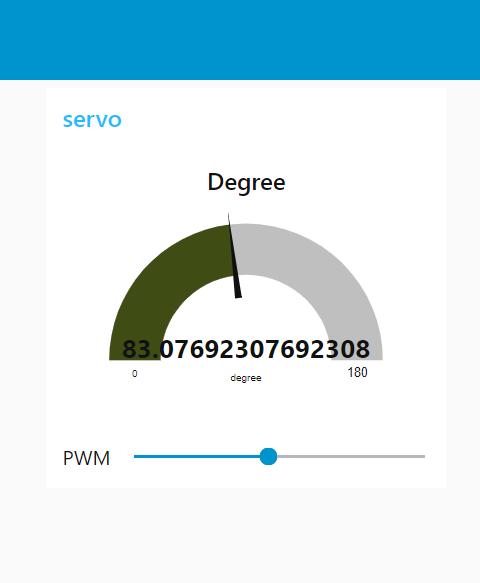
ثالثًا: واجهة المستخدم
: واجهة المستخدم سوف يظهر في واجهة المستخدم عنصرين العنصر الأول المزلاج للتحكم بالسيرفو العنصر الثاني شكل المنقلة لإظهار زاوية محرك سيرفو
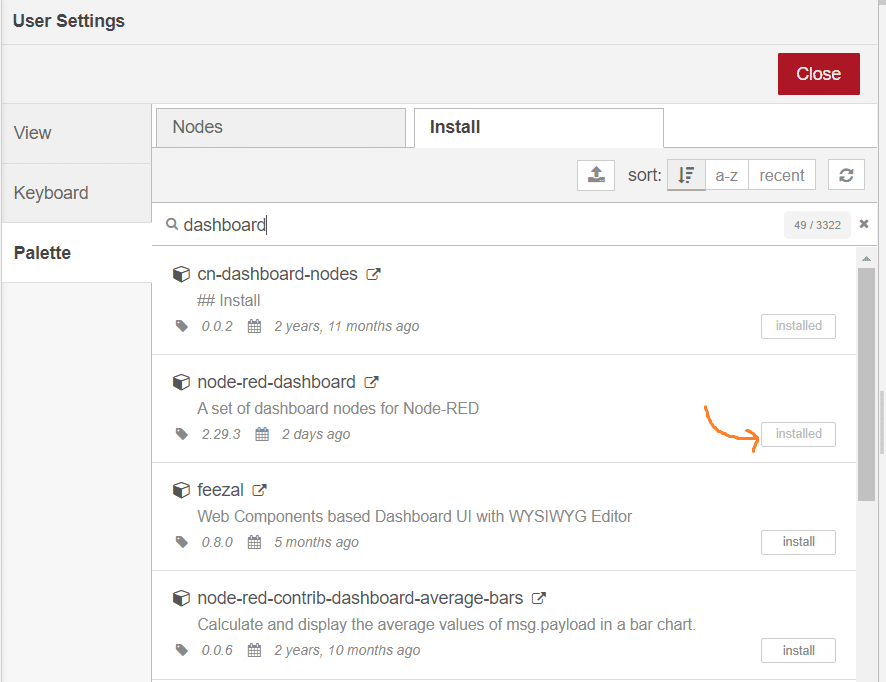
لتتمكن من انشاء واجهة مستخدم تحتاج إلى تنزيل مكتبة لوحة التحكم (Dashboard)
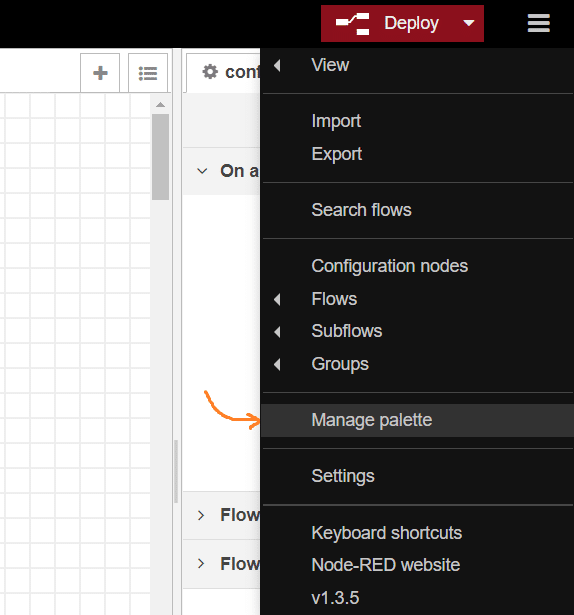
ستظهر لك قائمة يمكن من خلالها البحث عن المكتبة و تنزيلها
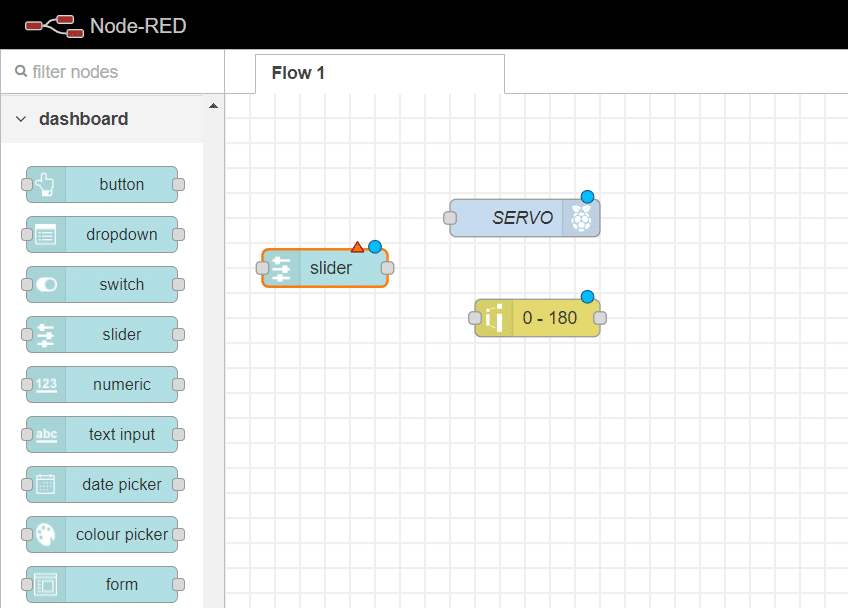
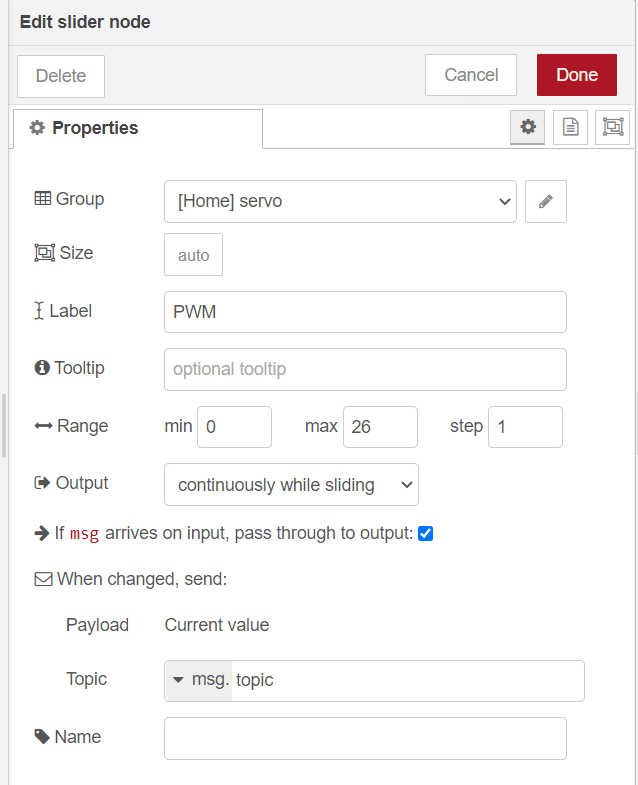
اسحب “slider” من قائمة عقد لوحة التحكم (Dashboard)
بالنقر على العقدة ستظهر لنا قائمة تساعدنا في التحكم باعدادات العقدة
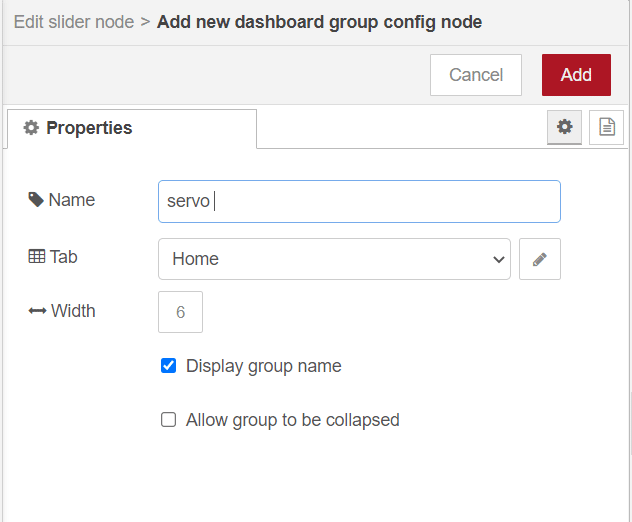
بالبداية قم باضافة مجموعة
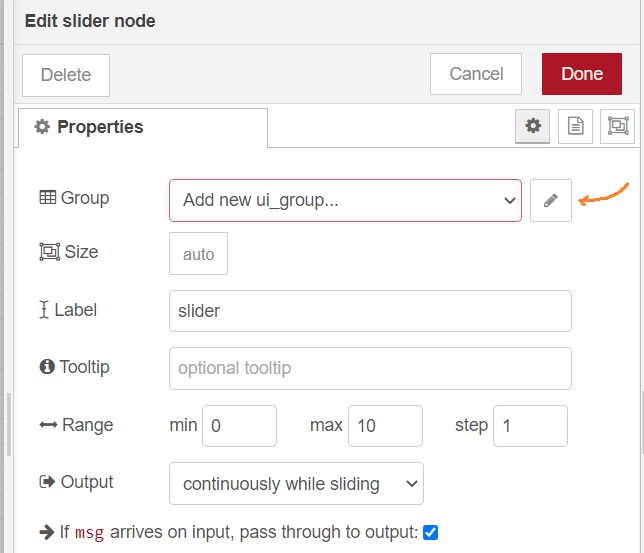
انقر على اشارة القلم ثم انشئ مجموعة لواجهة المستخدم
حدد المجموعة و المدى من (0-26)
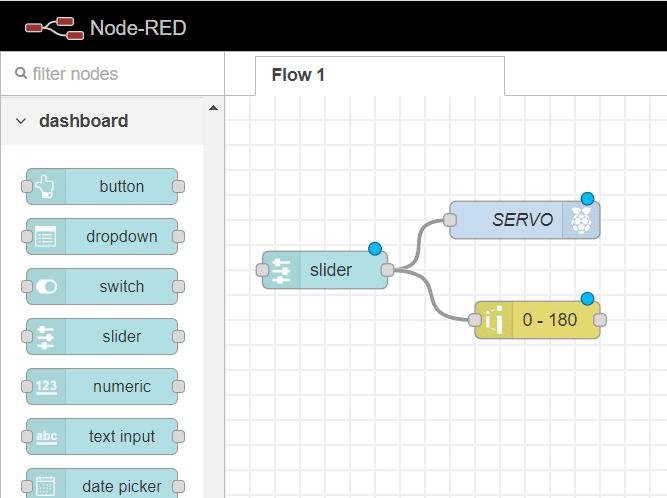
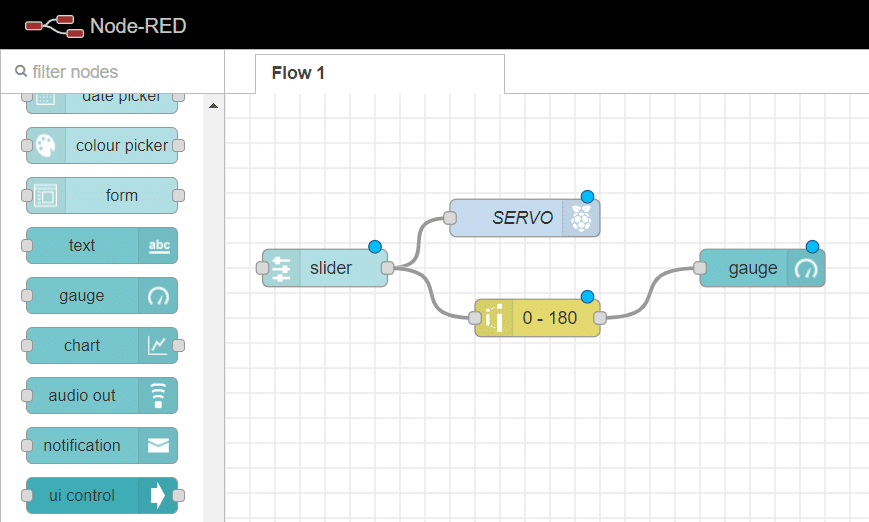
الآن نقوم بتوصيل العقد معا لإنشاء التدفق المطلوب. من النقط الرمادية على الجانب الأيمن من عقد الإدخال نقوم بسحب سلك ربطه بعقدة الإخراج .
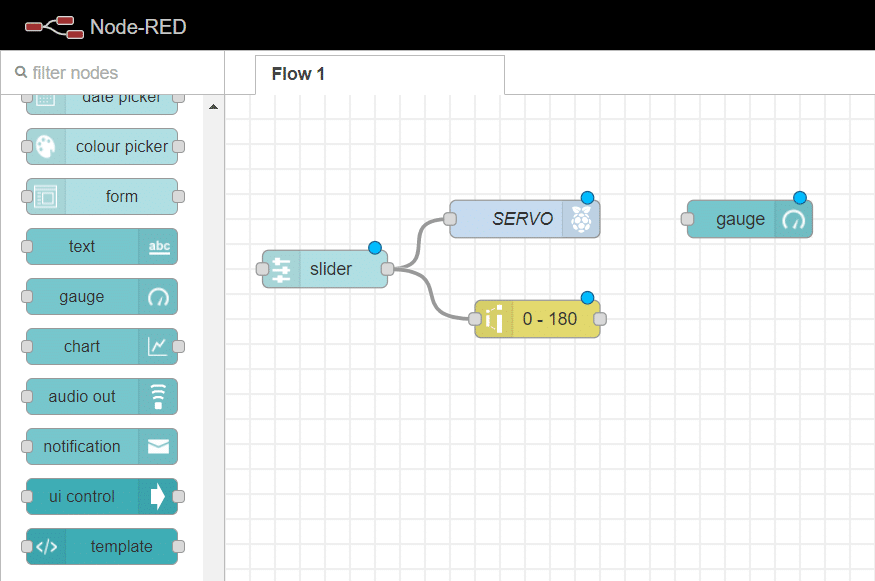
نظيف لواجهة المستخدم شكل المنقلة الذي يشير للزاوية التي يوجد عندها محرك سيرفو
نسحب “gauge” من قسم “Dashboard”
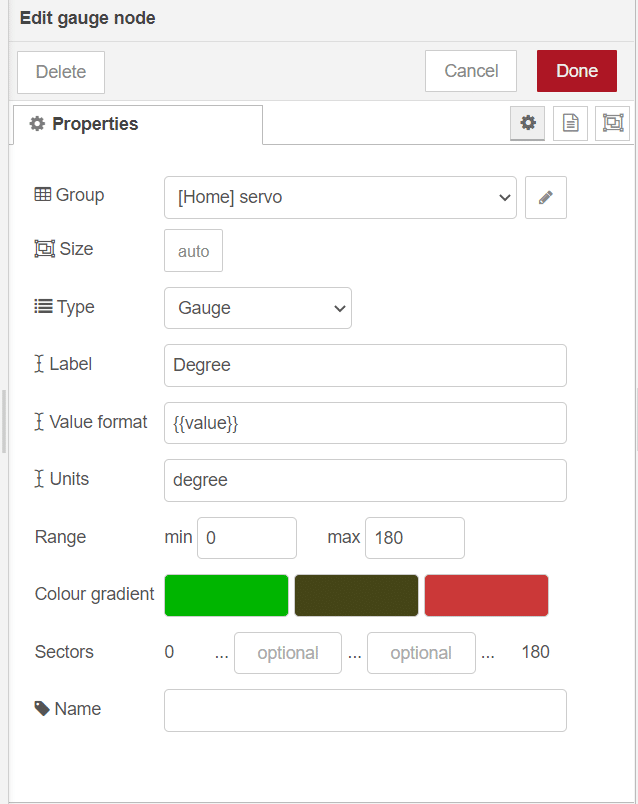
نحدد القيمة التي سيمثلها الشكل
نوصل العقد معا لإنشاء التدفق المطلوب
أخيرًا: نشر التدفق
تم الانتهاء من التدفق، حتى نتمكن من نشره. انقر على زر Deploy الأحمر الكبير أعلى يمين الشاشة. ستظهر رسالة في الأعلى تقول تم نشرها بنجاح “Successfully deployed”