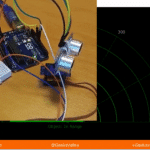
في هذا المشروع سنتعلم كيفية استخدام حساس الموجات الفوق صوتية (Ultrasonic) مع الأردوينو في عمل مسح للفضاء المحيط

المكونات المطلوبة

حساس المسافة (Ultrasonic Sensor)


محرك السيرفو (Servo Motor)
هو عبارة عن جهاز يقوم بتحويل الاشارة الكهربائية إلى حركة ميكانيكية. يختلف هذا المحرك عن محركات التيار المستمر (DC) في ان حركته غير مستمرة.

اي عند دخول إشارة كهربائية إلى محرك السيرفو بقيمة معينة ينتج عن ذلك حركة بزاوية معينة ثم يتوقف المحرك عن الحركة ويظل محتفظ بالزاوية التي وصل إليها. على عكس محركات التيار المستمر فإنها تستمر في الدوران بمجرد إمدادها بالتيار الكهربائي.
مداخل محرك السيرفة :
كيفية عمله
يعمل محرك السيرفو بوضع اشارة كهربائية PWM بزمن محدد . تقوم مكتبة السيرفو في الاردوينو بالاهتمام بهذا الامر عنك، فحسب هذه الإشارة يتحرك السيرفو بزاوية معينة من 0 إلى 180 درجة.
لمعلومات اكتر راجع درس محرك السيرفو Servo Motor
حساس الموجات فوق الصوتية
يقوم مستشعر الموجات فوق الصوتية بقياس المسافة. حيث يقوم باطلاق موجات صوتية عالية التردد لا يمكن للأذن البشرية سماعها وعند اصطدام هذه الموجات بجسم ما ترتد على شكل صدى Echo ،عند ارتداد هذه الموجات يتم حساب الزمن الذي استغرقته للعودة إلى المستشعر ثم يتم حساب المسافة.

توصيل الدارة
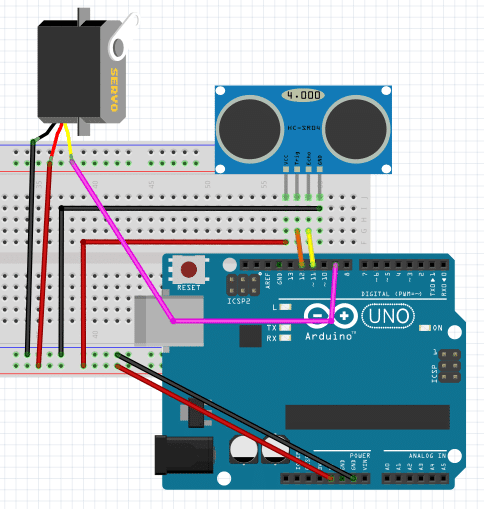
قم بتوصيل الدارة كما هو موضح بالصورة التالية :
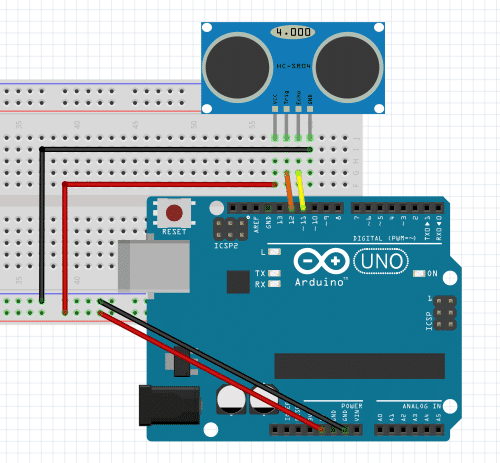
تم توصيل حساس الموجات الفوق صوتية (Ultrasonic) مع الأردوينو كما هو موضح بالصورة :
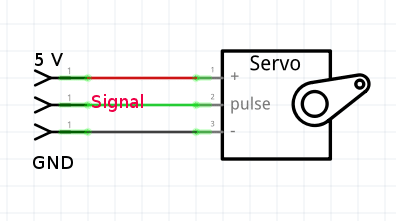
قم توصيل محرك السيرفو كما هو موضح بالجدول :
| الطرف | التوصيل |
| الاحمر | Vcc / 5 V |
| البرتقالى | Arduino Pin 9 |
| البنى | Ground |
يتم تثبيت حساس الموجات الصوتية فوق محرك السيرفو، ينتمكن من إلتقاط الأبعاد للمكان بالكامل. انظر إلى الصورة التالية :

البرمجة :
سنقوم بكتابة برنامج يقوم بإرسال إشارة دوران محرك السيرفو بزاوية معينة وحساب المسافة الموجودة امام المستشعر عند تلك الزاوية. ثم يتم ارسال هذه النتائج إلى المنفذ التسلسلي.
وبدلا من قراءة هذه النتائج على الشاشة التسلسلية (Serial Monitor) نقوم بتشغيل برنامج الماتلاب. نقوم بالماتلاب بعمل كود خاص به ليتم تشغيله لإجراء بعض الحسابات ومن ثم إعطاء مخطط بسيط لخريطة المكان.
برمجة الأردوينو :
#include <Servo.h>
#include <NewPing.h>
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
Servo myservo;
int pos = 0;
int it = 10;
void setup() {
myservo.attach(9);
Serial.begin(9600);
delay(3000);
}
void loop() {
int i = 0;
int t = 0;
int a = 0;
for (i = 0; i < 180; i ++)
{
unsigned int uS = sonar.ping();
myservo.write(i);
delay(20);
for (t = 0; t < it; t++)
{
uS = sonar.ping();
a = uS/US_ROUNDTRIP_CM + a;
delay(30);
}
a = a / (it-1);
t = 0;
Serial.println(a);
a = 0;
}
}
شرح الشفرة البرمجية (Code):
في البداية قمنا بادراج المكتبات المستخدمة مثل مكتبة السيرفو ومكتبة حساس الموجات فوق الصوتية ثم قمنا بتسمية منافذ الأردوينو المستخدمة في المشروع :
#include <Servo.h> #include <NewPing.h> #define TRIGGER_PIN 12 #define ECHO_PIN 11 #define MAX_DISTANCE 200
بعد ذلك اعلنا عن المتغيرات اللازمة مثل المتغيرات الخاصة بالسيرفو و حساس الموجات فوق الصوتية والتي تستخدمها المكتبات ايضا. اعلنا عن متغير pos المستخدم في تسجيل موضع السيرفو و المتغير it المستخدم كعداد.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); Servo myservo; int pos = 0; int it = 10;
في الدالة ()setup قمنا بوضع الاعدادات اللازمة مثل تشغيل السيرفو و السيريال ثم الانتظار 3 ثوان حتى نضمن ان المحرك اصبح في وضعه الصحيح :
void setup() {
myservo.attach(9);
Serial.begin(9600);
delay(3000);
}
في الدالة ()loop نقوم بتحريك السيرفو حركة واحدة واخذ 10 قراءات للحساس، لحساب المتوسط لها، ثم كتابتها على المنفذ التسلسلي الذي لاحقا سنقوم باستقبال النتائج من خلاله على برنامج الماتلاب.
ثم بعد ذلك نقوم بتحريك السيرفو درجة اخرى و ننفذ كل ماسبق مرة اخرى و هكذا حتى يكتمل دوران السيرفو 180 درجة .
void loop() {
int i = 0;
int t = 0;
int a = 0;
for (i = 0; i < 180; i ++)
{
unsigned int uS = sonar.ping();
myservo.write(i);
delay(20);
for (t = 0; t < it; t++)
{
uS = sonar.ping();
a = uS/US_ROUNDTRIP_CM + a;
delay(30);
}
a = a / (it-1);
t = 0;
Serial.println(a);
a = 0;
}
}
السبب في اخذ 10 قراءات و حساب المتوسط لها للحصول على دقة أعلى، لان من الممكن ان تكون احدى القراءات غير سليمة بسبب الضوضاء او لأي سبب اخر.
بعد رفع كود الأردوينو نقوم بتشغيل برنامج الماتلاب عم طريق كتابة الكود الخاص بالماتلاب في ملف file.m . اي عند كتابة كود الماتلاب في ملف نصي تأكد من أن الإمتداد له m. أو قم بإنشاء ملف script من داخل اماتلاب وضع الكود به.
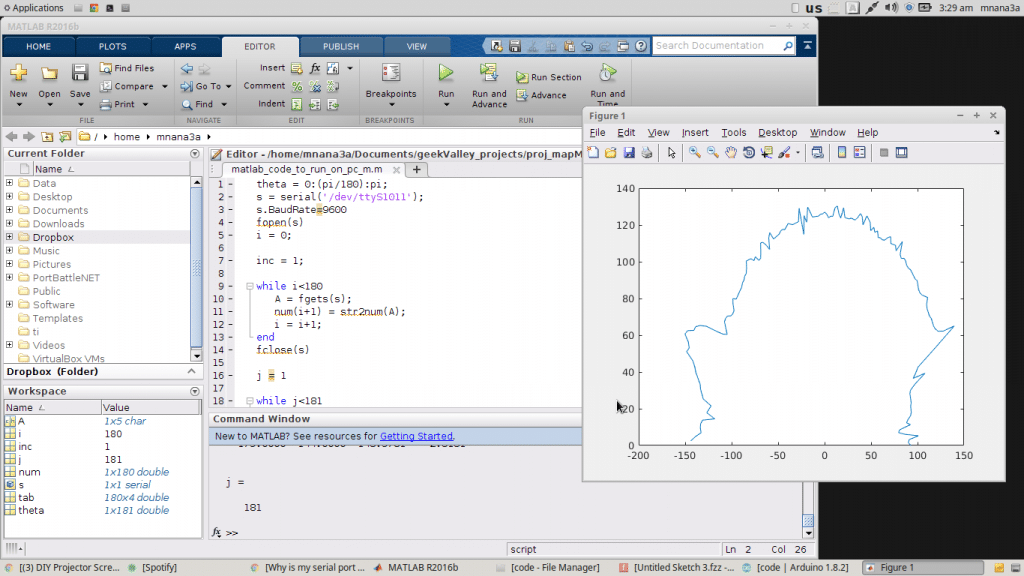
الشفرة البرمجية للماتلاب
theta = 0:(pi/180):pi;
s = serial('/dev/ttyS1011');
s.BaudRate=9600
fopen(s)
i = 0;
inc = 1;
while i<180
A = fgets(s);
num(i+1) = str2num(A);
i = i+1;
end
fclose(s)
j = 1
while j<181
tab(j,1) = (j-1)*inc
tab(j,2) = num(j)
tab(j,3) = num(j)*cosd((j-1)*inc)
tab(j,4) = num(j)*sind((j-1)*inc)
j = j+1
end
%figure
%polar(theta,num)
plot(tab(:,3),tab(:,4))
يقوم الكود بإستقبال ما يتم رسله من قبل الأردوينو على المنفذ التسلسلي. بعد ذلك، يقوم بعمل بعض العمليات الحسابية على البيانات المستلمة وثم يقوم بتجميع النتائج في مصفوفة ضخمة. في النهاية يقوم بعمل مخطط للنتائج.
ملاحظة :
التغيير الوحيد الذي ستقوم بة في كود الماتلاب هو تغير اسم منفذ السيريال الذي يستخدمه الاردوينو.

فتقوم بتغييرة الى COM0 او COM1 او ايا كان اسم المنفذ الذي يستخدمة الاردوينو
![]()
و بعد ان تنتهي من كل شيء تقوم بضغط Run في برنامج الماتلاب و تنتظر إلى ان ينتهي السيرفو من عمل المشوار كامل ثم تظهر النتائج على الشاشة
ملاحظة : عند تشغيل كود الماتلاب تاكد ان لا يكون الSerial Monitor الخاص ببرنامج الاردوينو مفتوح