مقدمة
يمكن أن يكون تحديد سرعة حركة الأجسام مفيدًا وضروريًا في العديد من التطبيقات، ويمكن استخدام وسائل متنوعة لتحديد السرعة، في هذا الدرس ستتعلم طريقة قياس السرعة والمسافة باستخدام الاردوينو وحساس الموجات فوق الصوتية.

المواد والأدوات
1× اردوينو اونو





1× مقاومة 220 Ω

1× 40 رأس دبوس
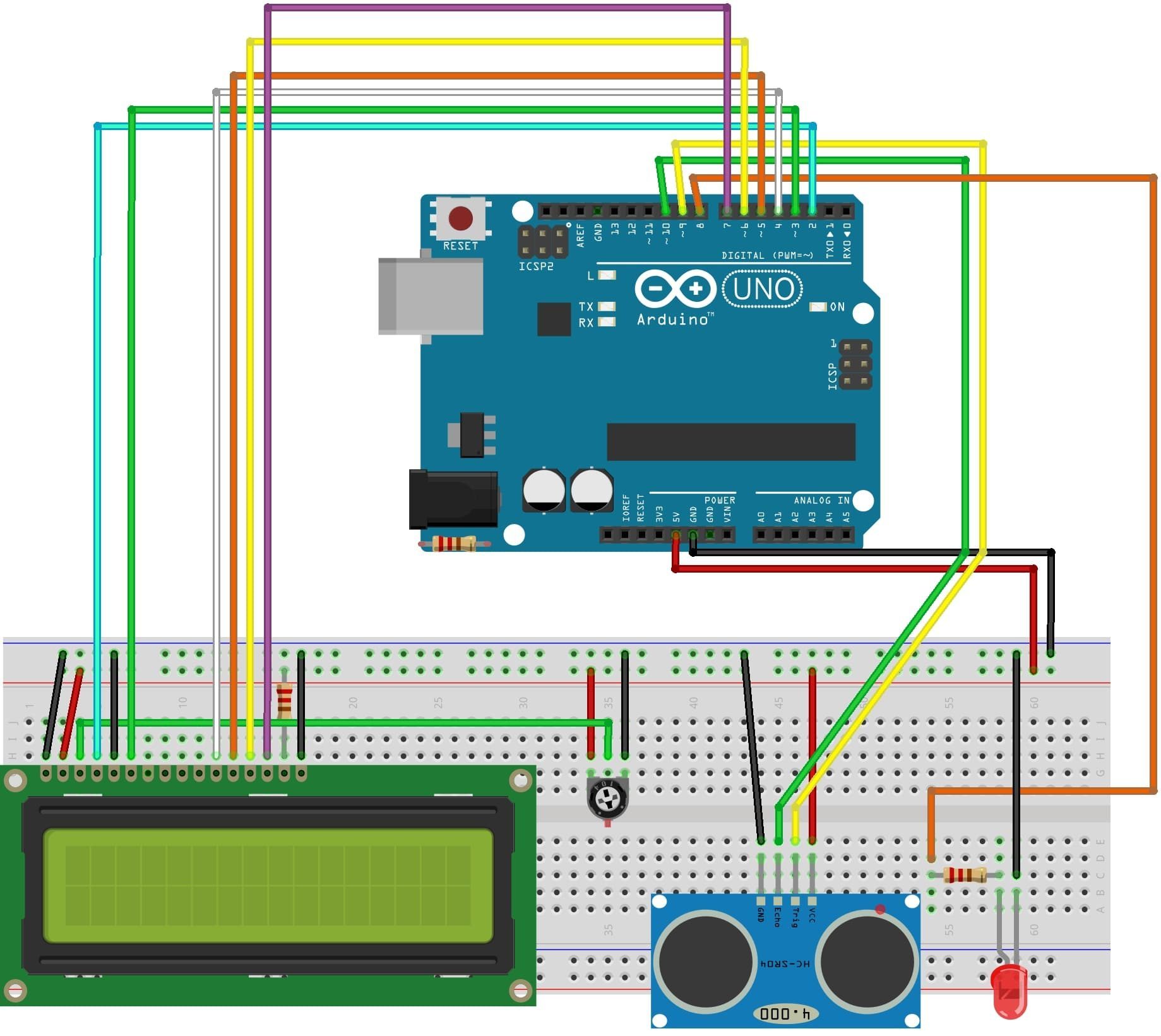
توصيل الدائرة
للمزيد حول حساس الموجات الفوق صوتية يمكنك الرجوع للدرس التالي حساس الموجات فوق الصوتية.
لمعرفة المزيد حول الشاشة الكرستالية يمكنك الرجوع للدرس التحكم بالشاشة الكرستالية LCD
لابد من تلحيم المنافذ مع الشاشة الكرستالية، للمزيد حول اللحام يمكنك الرجوع للدرس تعلم كيفية التلحيم – تلحيم القطع باللوحة الإلكترونية
الكود البرمجي
ارفع الكود البرمجي التالي على لوحة الاردوينو باستخدام برنامج اردوينو (IDE).
#include <LiquidCrystal.h>
const int RS = 2, EN = 3, D4 = 4, D5 = 5, D6 = 6, D7 = 7;
LiquidCrystal lcd(RS,EN,D4,D5,D6,D7);
// defines pins numbers
const int trigPin = 9;
const int echoPin = 10;
// defines variables
long duration;
int distance1=0;
int distance2=0;
double Speed=0;
int distance=0;
void setup()
{
lcd.begin(16, 2);// LCD 16X2
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
pinMode(8 , OUTPUT);
Serial.begin(9600); // Starts the serial communication
}
void loop()
{
//calculating Speed
distance1 = ultrasonicRead(); //calls ultrasoninicRead() function below
delay(1000);//giving a time gap of 1 sec
distance2 = ultrasonicRead(); //calls ultrasoninicRead() function below
//formula change in distance divided by change in time
Speed = (distance2 - distance1)/1.0; //as the time gap is 1 sec we divide it by 1.
//Displaying Speed
Serial.print("Speed in cm/s :");
Serial.println(Speed);
lcd.setCursor(0,1);
if (Speed<0)
{
lcd.print("Speed cm/s ");
lcd.print("0");
}
if (Speed>0)
{
lcd.print("Speed cm/s ");
lcd.print(Speed);
}
// LED indicator
if (distance >0 && distance <5)
{
digitalWrite( 8 , HIGH);
delay(50); // waits for a second
}
if (distance > 5 && distance <10 )
{
digitalWrite( 8 , HIGH);
delay(50); // waits for a second
digitalWrite( 8 , LOW); // sets the LED off
delay(50); // waits for a second
}
if (distance >10 && distance < 20)
{
digitalWrite( 8 , HIGH);
delay(210); // waits for a second
digitalWrite( 8 , LOW); // sets the LED off
delay(210); // waits for a second
}
if (distance >20 && distance < 35)
{
digitalWrite( 8 , HIGH);
delay(610); // waits for a second
digitalWrite( 8 , LOW); // sets the LED off
delay(610); // waits for a second
}
}
float ultrasonicRead ()
{
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
//calculating distance
distance= duration*0.0340 / 2;
// Prints the distance on the Serial Monitor
Serial.print("Distance in cm : ");
Serial.println(distance);
lcd.setCursor(0,0);
lcd.print("Dist. in cm ");
lcd.print(distance);
lcd.print(" ");
return distance;
}
شرح الكود البرمجي
هذا السطر يستدعي مكتبة الشاشة الكرستالية.
هذا السطر يستدعي مكتبة الشاشة الكرستالية.
نستطيع تحميلها بتتبع المسار التالي:
Sketch > Include libraries > Manage libraries
ثم نكتب بخانة البحث Liquid crystal by Arduino
ثم نضغط على Install.
#include <LiquidCrystal.h>
بعد ذلك أعلنا عن المتغيرات اللازمة مثل المتغيرات الخاصة بالشاشة الكرستالية وتم توضيح المداخل التي استخدامها في لوحة الاردوينو لربط الشاشة الكرستالية.
const int RS = 2, EN = 3, D4 = 4, D5 = 5, D6 = 6, D7 = 7; LiquidCrystal lcd(RS,EN,D4,D5,D6,D7);
هذه الأسطر توضح منافذ الاردوينو التي ستستخدمها لربط حساس المسافة في هذا المشروع المنفذ رقم 9 مع triqPin في الحساس والمنفذ رقم 10 مع echoPin.
// defines pins numbers const int trigPin = 9; const int echoPin = 10;
هنا يتم تهيئة المتغيرات التي سيتم تخزين فيها قيم المسافة والسرعة وسيتم وضع القيمة الابتدائية لكل من المسافة والسرعة=0.
// defines variables long duration; int distance1=0; int distance2=0; double Speed=0; int distance=0;
في الدالة ()setup يتم تهيئة الشاشة الكرستالية وحساس المسافة وتهيئة المنفذ 8 مع الثنائي المشع للضوء الأحمر.
void setup() { lcd.begin(16, 2);// LCD 16X2 pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output pinMode(echoPin, INPUT); // Sets the echoPin as an Input pinMode( 8 , OUTPUT); Serial.begin(9600); // Starts the serial communication }
في الدالة ()loop يتم قياس السرعة والمسافة بشكل مستمر وبعد كل قراءة سيتم طباعة القيم المقروءة من الحساس على الشاشة الكرستالية .
إذا كانت المسافة:
أكبر من الصفر وأصغر من 5 فسيعمل الثنائي المشع للضوء.
وإذا كانت المسافة أكبر من 5 وأصغر من 10 أو أكبر من 10 وأصغر من 20 أو كانت أكبر من 20 وأصغر من 35 فسيعمل الثنائي المشع أقل من ثانية ثم ينطفيء لمدة أقل من ثانية وهكذا.
void loop()
{
//calculating Speed
distance1 = ultrasonicRead(); //calls ultrasoninicRead() function below
delay(1000);//giving a time gap of 1 sec
distance2 = ultrasonicRead(); //calls ultrasoninicRead() function below
//formula change in distance divided by change in time
Speed = (distance2 - distance1)/1.0; //as the time gap is 1 sec we divide it by 1.
//Displaying Speed
Serial.print("Speed in cm/s :");
Serial.println(Speed);
lcd.setCursor(0,1);
if (Speed<0)
{
lcd.print("Speed cm/s ");
lcd.print("0");
}
if (Speed>0)
{
lcd.print("Speed cm/s ");
lcd.print(Speed);
}
// LED indicator
if (distance >0 && distance <5)
{
digitalWrite( 8 , HIGH);
delay(50); // waits for a second
}
if (distance > 5 && distance <10 )
{
digitalWrite( 8 , HIGH);
delay(50); // waits for a second
digitalWrite( 8 , LOW); // sets the LED off
delay(50); // waits for a second
}
if (distance >10 && distance < 20)
{
digitalWrite( 8 , HIGH);
delay(210); // waits for a second
digitalWrite( 8 , LOW); // sets the LED off
delay(210); // waits for a second
}
if (distance >20 && distance < 35)
{
digitalWrite( 8 , HIGH);
delay(610); // waits for a second
digitalWrite( 8 , LOW); // sets the LED off
delay(610); // waits for a second
}
}
float ultrasonicRead ()
{
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echoPin, HIGH);
//calculating distance
distance= duration*0.0340 / 2;
// Prints the distance on the Serial Monitor
Serial.print("Distance in cm : ");
Serial.println(distance);
lcd.setCursor(0,0);
lcd.print("Dist. in cm ");
lcd.print(distance);
lcd.print(" ");
return distance;
}
يمكنك اختبار نظام قياس السرعة والمسافة بعد رفع الكود البرمجي على لوحة الاردوينو.
لا تنسَ فصل مصدر الطاقة بعد الانتهاء من استخدام النظام.