مقدمة:
في هذا المشروع سنقوم بإنشاء روبوت يلقي التحية عند الاقتراب منه مسافة معينة.
الأدوات المستخدمة:
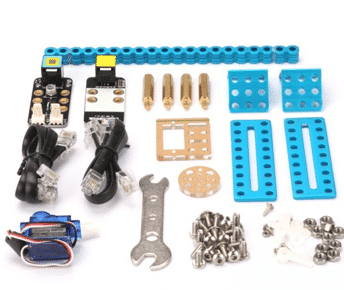
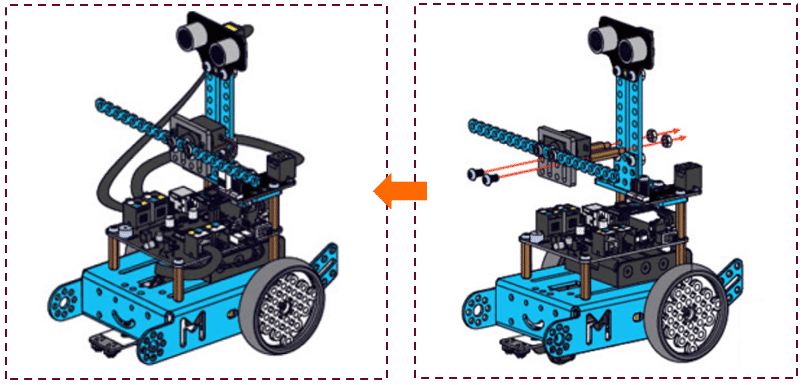
نبدأ بتركيب الروبوت. ومن ثم نقوم بتشكيل الروبوت بإضافة Servo Motor & Ultrasonic Sensor كالتالي :
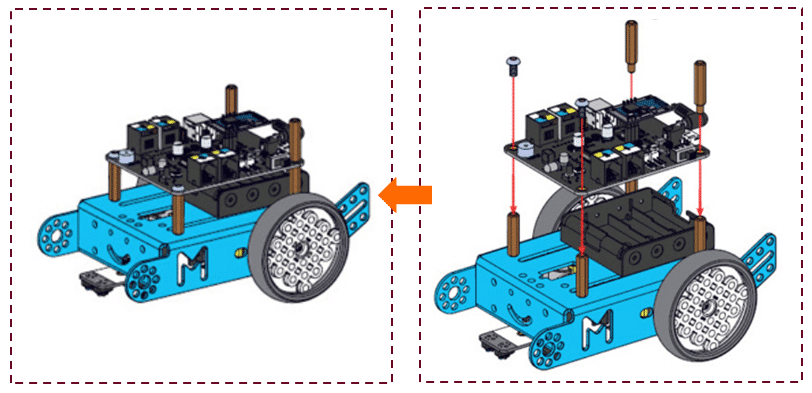
طريقة التركيب :
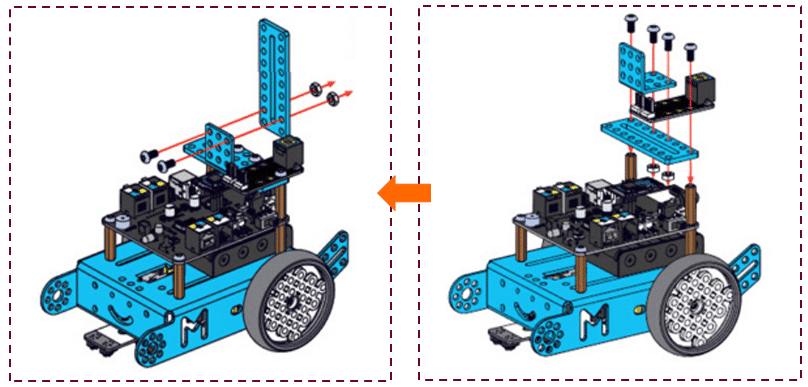
أولا : قم بإعادة تركيب mBot .
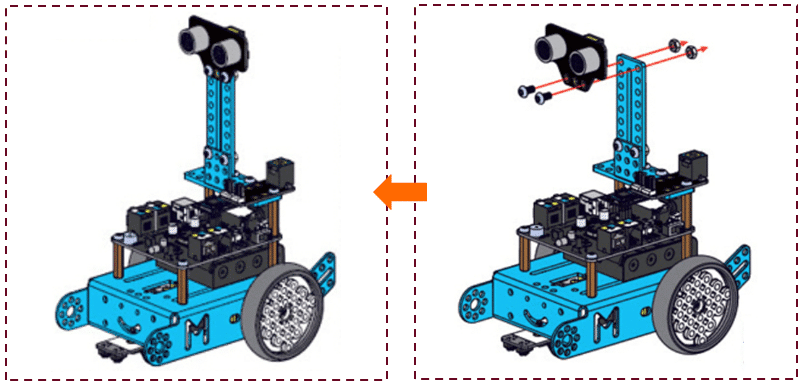
ثم نقوم بتثبيت مستشعر الموجات فوق الصوتية
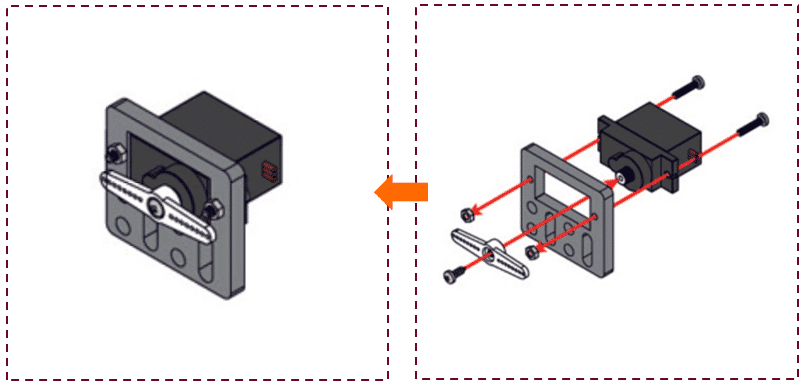
وبعد ذلك، قم بتثبيت محرك الـ Servo :
ثم نقوم بتثبيت قطعة الـ cuttable linkage :
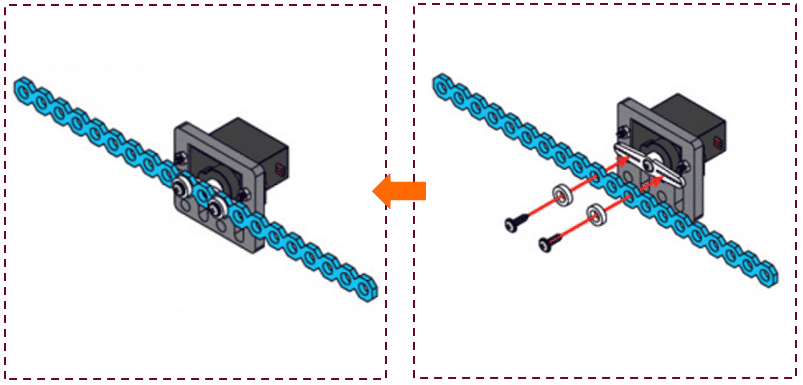
وأخيرا، قم بتجميع القطع :
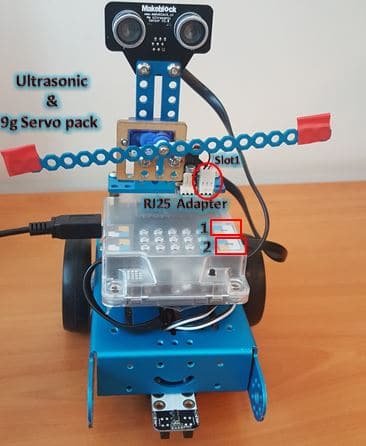
التوصيل بلوحة التحكم :
ثم نقوم بتوصيل Servo Motor بمدخل رقم 1 و نوصل Ultrasonic Sensor بمدخل رقم 2
برمجة المشروع:
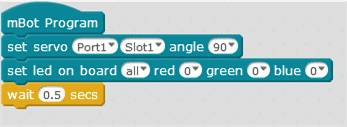
أولا: نبدأ بتهيئة محرك الـسيرفو، و الـ LED عن طريق وضع القيم الإبتدائية كالتالي:
بعدها نقوم بإدراج دالة التكرار

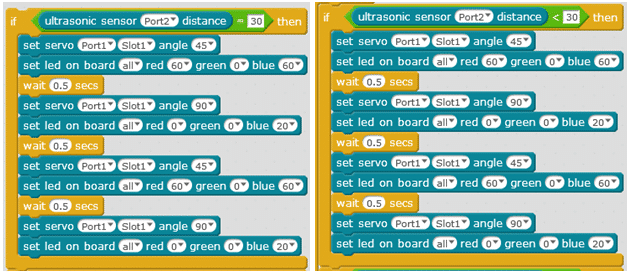
داخل دالة التكرار، نقوم بإضافة الدالة الشرطية if. تفيدنا هذه الدالة لجعل الروبوت يلقي التحية عند الإقتراب منه مسافة 30 سم أو أقل.

سوف نقوم بإستخدام الحالات الآتية في الدوال الشرطية :
الحالة الأولى إذاكانت المسافة أكبرمن30 سم.
الحالة الثانية إذاكانت المسافة تساوي30 سم.
الحالة الثالثة إذاكانت المسافة أصغر من30 سم.
في الحالة الأولى، فإن الروبوت لن يكون بإلقاء التحية ويعود إلى حالته الإبتدائية وسيتم إضائة الـ LED باللون الأحمر كما هو موضح :

ثم نقوم بإستخدام الحالة الثانية والثالثة، لجعل الروبوت يلقي التحية ويضيء باللون الأزرق والوردي كالتالي :
الشكل النهائي للأوامر البرمجية:

لمعرفة أساسيات البرمجة المستخدمة الرجاء مراجعة درس جولة حول الأوامر البرمجية.